

Microcuencas robóticas brandas

A microcuenca robótica da imaxe é capaz de recoller obxectos moi fráxiles sen causar ningún dano aos mesmos. Menos de medio milímetro de lado a lado é a cintura da formiga e outro tanto o ovo de peixe que aparece na imaxe inferior. O tentáculo enrólase sobre si mesmo paira suxeitar o obxecto. Foi desenvolvida na Universidade de Iowa e presentada na revista Scientific Reports. Segundo os investigadores, o tentáculo pode ser moi útil paira aplicacións biomédicas, como microcirugías.
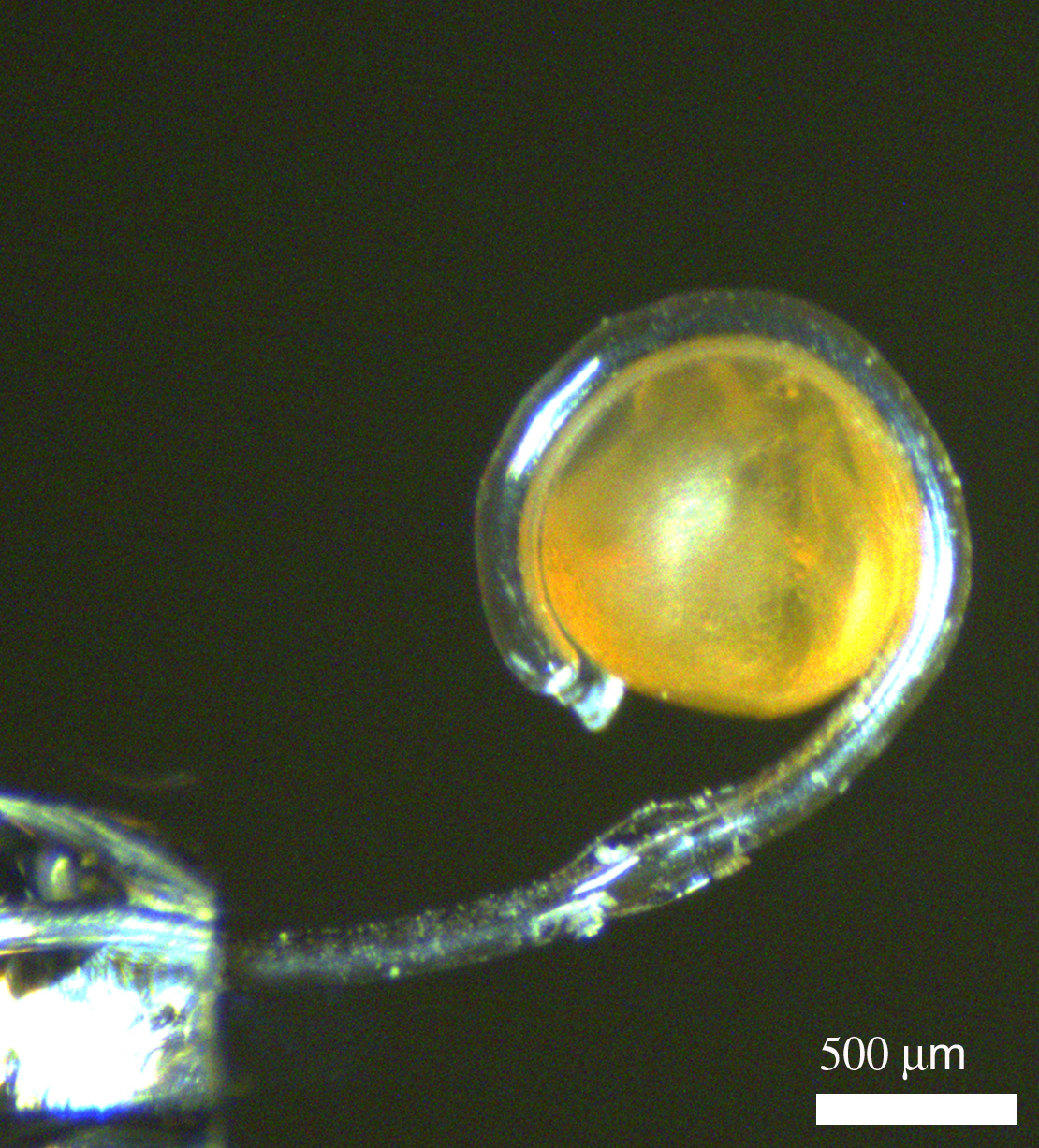
Até un diámetro de 185 micrómetros pódese reducir a espiral final do tentáculo. De feito, a principal achega da investigación foi a incorporación exitosa da robótica branda, baseada en sistemas biolóxicos, a tan pequena escala. Até agora, só na escala do centrímetro conseguiuse que o sistema formase máis dun espiral.
Investigadores estadounidenses inventaron un novo sistema de fabricación paira crear microcuencas. Baséase na técnica da litografía branda, é dicir, en primeiro lugar móllase una persoal cilíndrica co elastómero PDMS en fase líquida e despois, quentado, o polímero se solidifica ao redor do mesmo. Microtubo de PDMS, o tentáculo acaba extraendo directamente do cilindro. Esta metodoloxía permitiu xerar una tubaxe de moi pequeno tamaño: Ten un diámetro interior de 100-125 micrómetros e un espesor de 8-32 micrómetros, paredes. Cando está estendido, o microtubo non é totalmente plano, ten un abultamiento que lle confire a capacidade de enrolarse na espiral. Paira accionar o tentáculo utilizan una xiringa común.
Segundo os investigadores, o accionamiento pneumático (por aire comprimido) é un bo candidato paira a súa aplicación en robots brandos a escala microscópica, pola súa sinxeleza e eficacia, razón pola que foi seleccionado. Con todo, era un gran reto levalo á práctica. Agora desenvolveron un camiño paira poder utilizalo.
Zu idazle
Zientzia aldizkaria

