

Microcuencas robòtiques toves

La microcuenca robòtica de la imatge és capaç de recollir objectes molt fràgils sense causar cap mal a aquests. Menys de mig mil·límetre de costat a costat és la cintura de la formiga i un altre punt l'ou de peix que apareix en la imatge inferior. El tentacle s'enrotlla sobre sí mateix per a subjectar l'objecte. Ha estat desenvolupada en la Universitat de Iowa i presentada en la revista Scientific Reports. Segons els investigadors, el tentacle pot ser molt útil per a aplicacions biomèdiques, com microcirugías.
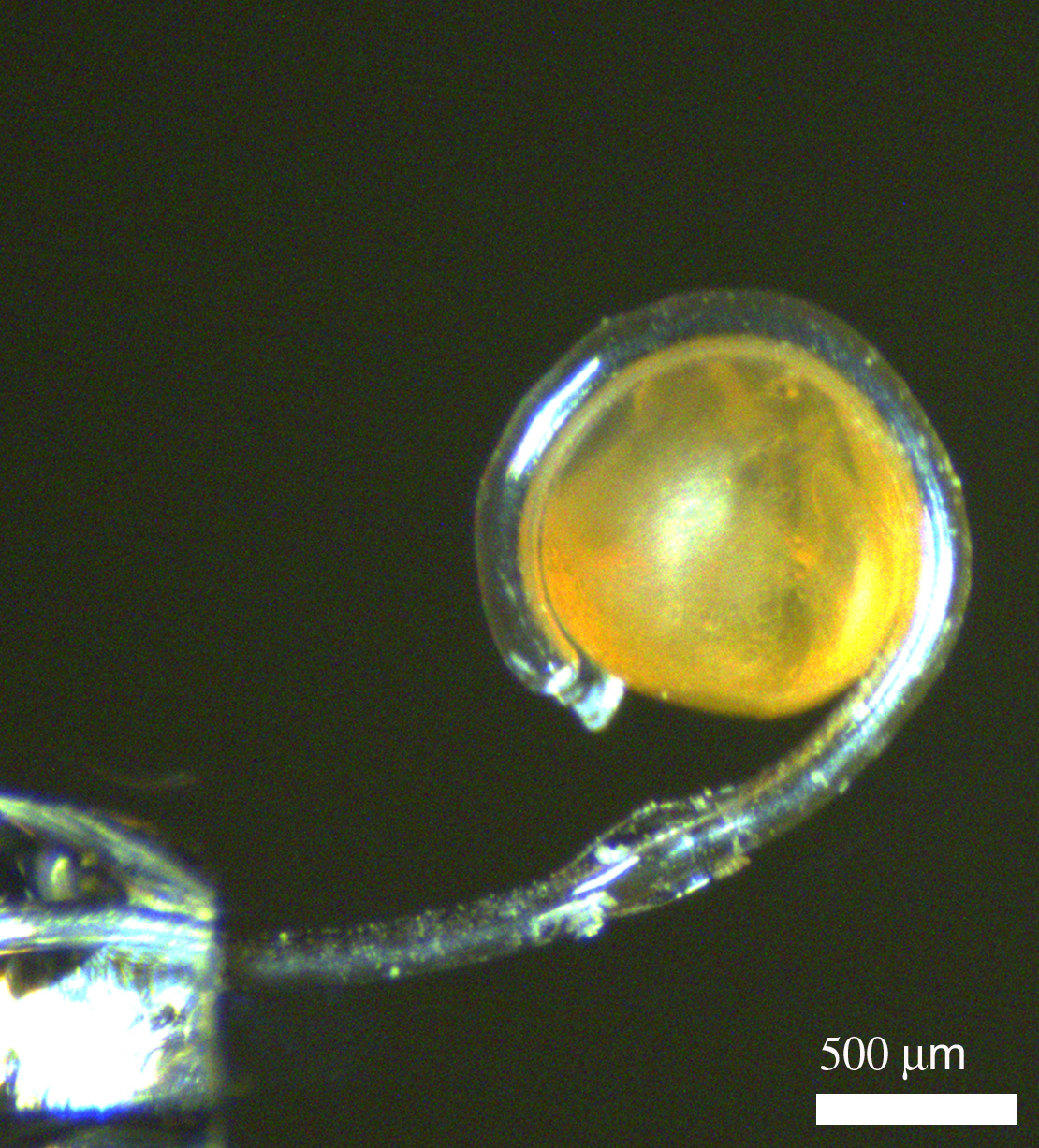
Fins a un diàmetre de 185 micròmetres es pot reduir l'espiral final del tentacle. De fet, la principal aportació de la recerca ha estat la incorporació reeixida de la robòtica tova, basada en sistemes biològics, a tan petita escala. Fins ara, només en l'escala del centrímetro es va aconseguir que el sistema formés més d'un espiral.
Investigadors estatunidencs han inventat un nou sistema de fabricació per a crear microcuencas. Es basa en la tècnica de la litografia tova, és a dir, en primer lloc es mulla una plantilla cilíndrica amb l'elastòmer PDMS en fase líquida i després, escalfat, el polímer se solidifica al voltant d'aquest. Microtubo de PDMS, el tentacle acaba extraient directament del cilindre. Aquesta metodologia ha permès generar una canonada de molt petita grandària: Té un diàmetre interior de 100-125 micròmetres i un gruix de 8-32 micròmetres, parets. Quan està estès, el microtubo no és totalment pla, té una inflor que li confereix la capacitat d'enrotllar-se en l'espiral. Per a accionar el tentacle utilitzen una xeringa comuna.
Segons els investigadors, l'accionament pneumàtic (per aire comprimit) és un bon candidat per a la seva aplicació en robots tous a escala microscòpica, per la seva senzillesa i eficàcia, raó per la qual ha estat seleccionat. No obstant això, era un gran repte portar-lo a la pràctica. Ara han desenvolupat un camí per a poder utilitzar-lo.
Zu idazle
Zientzia aldizkaria

