

Microcuencas robóticas blandas

La microcuenca robótica de la imagen es capaz de recoger objetos muy frágiles sin causar ningún daño a los mismos. Menos de medio milímetro de lado a lado es la cintura de la hormiga y otro tanto el huevo de pescado que aparece en la imagen inferior. El tentáculo se enrolla sobre sí mismo para sujetar el objeto. Ha sido desarrollada en la Universidad de Iowa y presentada en la revista Scientific Reports. Según los investigadores, el tentáculo puede ser muy útil para aplicaciones biomédicas, como microcirugías.
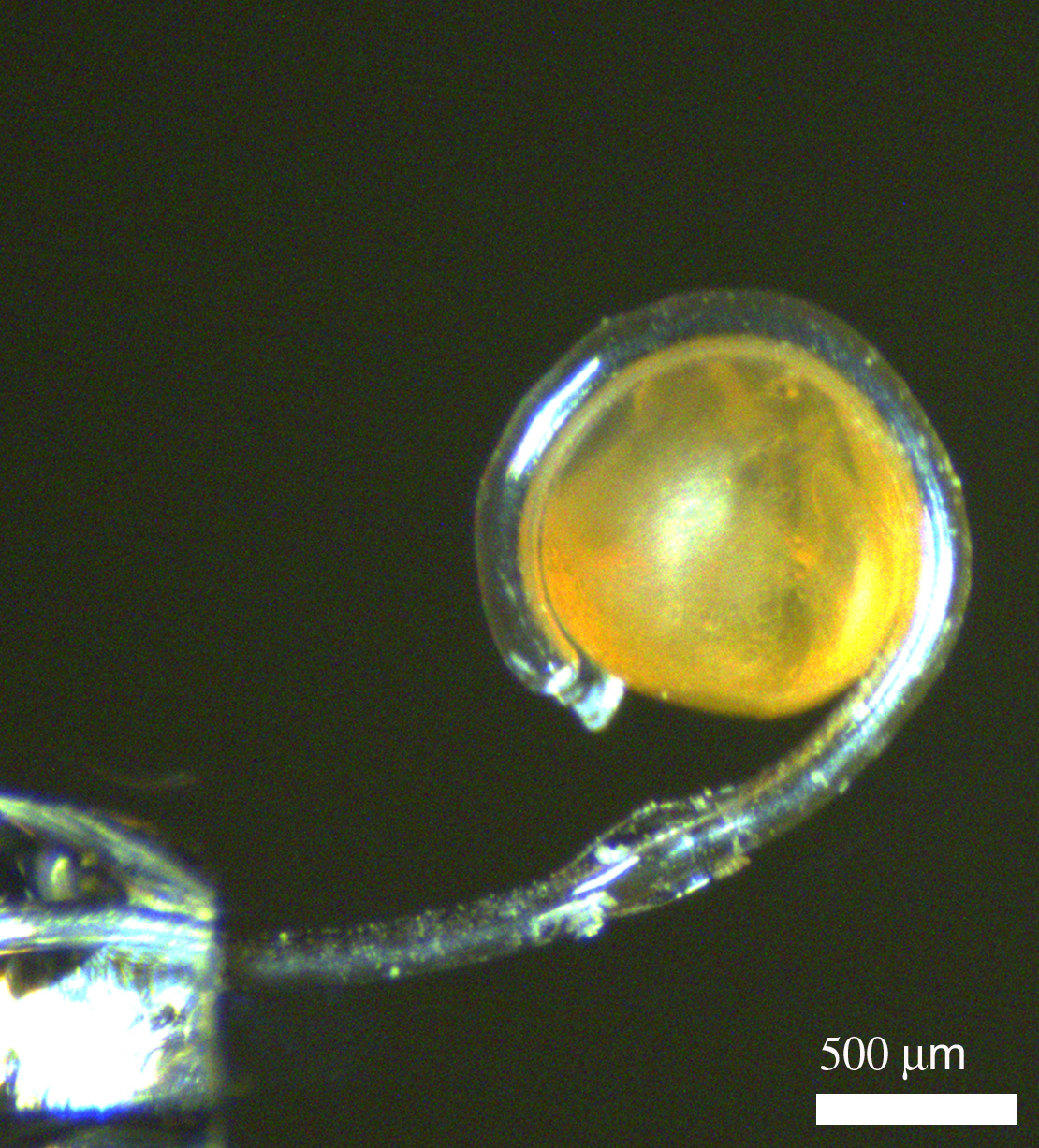
Hasta un diámetro de 185 micrómetros se puede reducir la espiral final del tentáculo. De hecho, la principal aportación de la investigación ha sido la incorporación exitosa de la robótica blanda, basada en sistemas biológicos, a tan pequeña escala. Hasta ahora, sólo en la escala del centrímetro se consiguió que el sistema formara más de un espiral.
Investigadores estadounidenses han inventado un nuevo sistema de fabricación para crear microcuencas. Se basa en la técnica de la litografía blanda, es decir, en primer lugar se moja una plantilla cilíndrica con el elastómero PDMS en fase líquida y después, calentado, el polímero se solidifica alrededor del mismo. Microtubo de PDMS, el tentáculo acaba extrayendo directamente del cilindro. Esta metodología ha permitido generar una tubería de muy pequeño tamaño: Tiene un diámetro interior de 100-125 micrómetros y un espesor de 8-32 micrómetros, paredes. Cuando está extendido, el microtubo no es totalmente plano, tiene un abultamiento que le confiere la capacidad de enrollarse en la espiral. Para accionar el tentáculo utilizan una jeringa común.
Según los investigadores, el accionamiento neumático (por aire comprimido) es un buen candidato para su aplicación en robots blandos a escala microscópica, por su sencillez y eficacia, razón por la que ha sido seleccionado. Sin embargo, era un gran reto llevarlo a la práctica. Ahora han desarrollado un camino para poder utilizarlo.
Zu idazle
Zientzia aldizkaria

