

Explorateurs de tramways
Ikertzailea eta irakaslea
Euskal Herriko Unibertsitateko Informatika Fakultatea
Les risques de voyager sur Mars et les raisons économiques ont empêché l'être humain d'y arriver. Mais au lieu de cela, il a déjà envoyé quelques explorateurs spéciaux: robots.
En 1997, le premier robot de la NASA arrive sur Mars: Robot Sojourner. En 2004, deux robots jumeaux sont arrivés pour inspecter la planète rouge : Spirit et Opportunity . Bien qu'initialement sa mission devait durer 3 mois, Opportunity continue de travailler! Spirit, pour sa part, a envoyé son dernier signal en 2010.
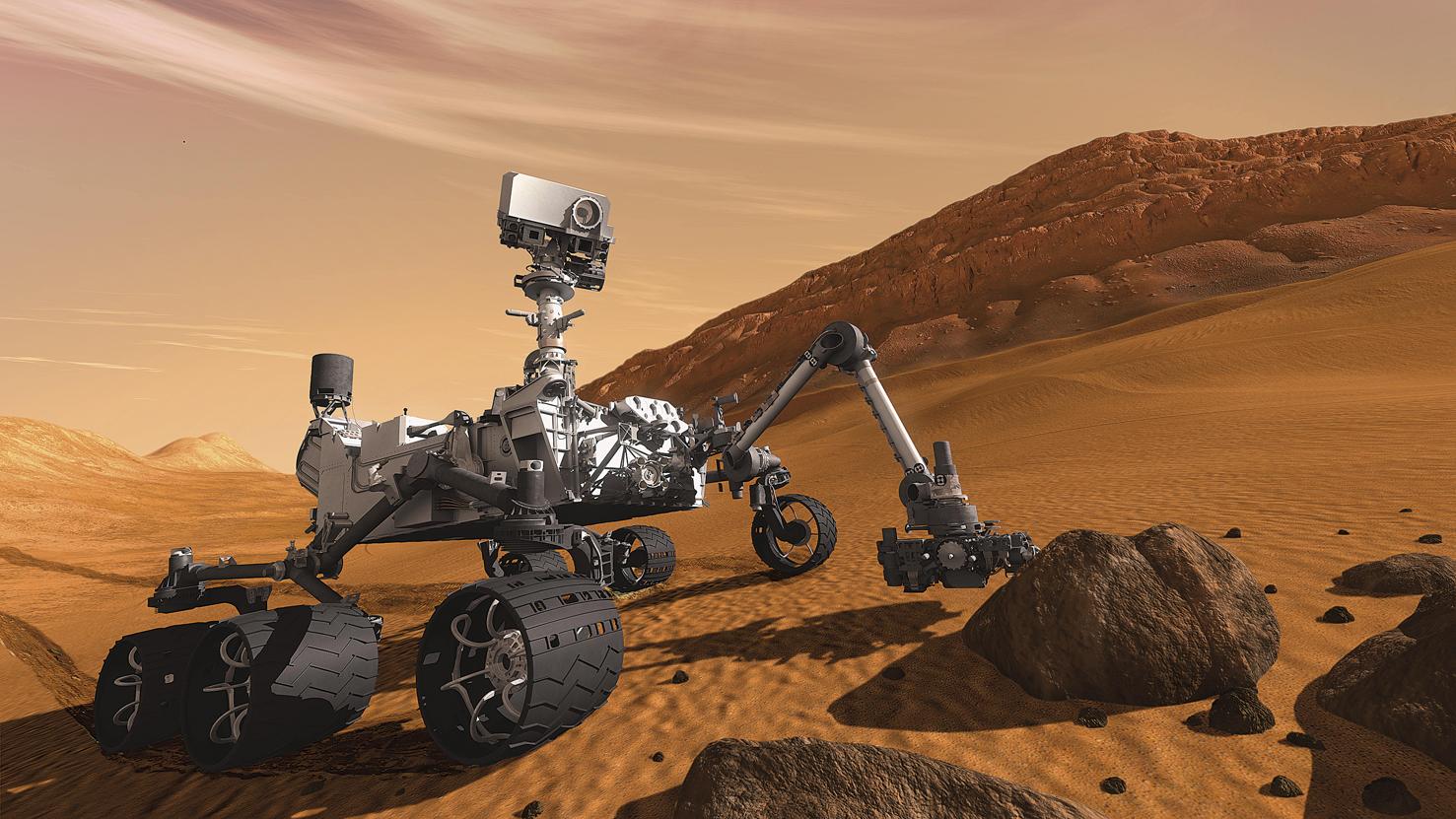
Enfin, le robot Curiosity est arrivé sur Mars en août 2012 (voir figure 1). Curiosity peut être considéré comme le frère aîné de ses antécédents. Plus technologiquement avancé, plus grand, il étudie déjà la surface terrestre et l'atmosphère de Mars, en utilisant tous les capteurs et appareils à sa portée.
Laboratoire scientifique de Mars
Curiosity n'est pas seulement un robot, c'est un laboratoire complet avec des objectifs scientifiques ambitieux. Ses objectifs sont:
· Déterminer s'il y a eu un mode de vie sur Mars.
· Connaître le climat de Mars.
· Etude de la géologie martienne.
· Collaborer à la préparation de futurs voyages humains.
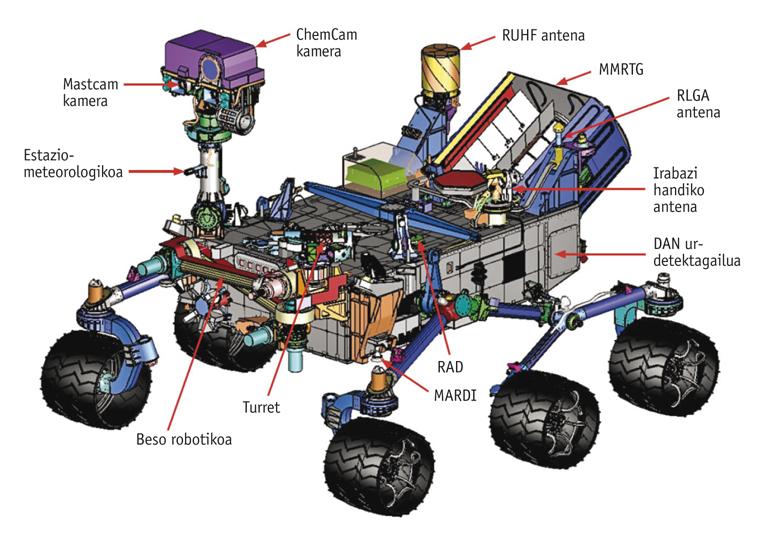
Pour la bonne performance du travail, le robot est devenu un laboratoire mobile, équipé d'équipements de haut niveau. La figure 2 montre les principaux dispositifs du robot. En résumé, Curiosity dispose de 17 caméras avec des objectifs différents, des antennes de communication avec la Terre, un bras robotique avec des capteurs et onze appareils pour l'analyse des échantillons de sol. Ils soulignent notamment le dispositif de détection d'eau DAN et la station d'étude climatique (REMS).
En plus de tout cela est énorme, Curiosity a besoin de la capacité de se déplacer pour faire son travail, recueillir beaucoup de données et de les faire parvenir aux chercheurs de la Terre. Autrement dit, notre robot doit se déplacer sur Mars pour atteindre les lieux les plus intéressants et y mettre en marche ses appareils. Bien sûr, pour cela, vous avez les six roues. Aussi un bras robotique. Par conséquent, il semble qu'il suffirait d'avoir une personne sur Terre qui sache conduire le robot avec les informations reçues par les caméras de Curiosity. Ce serait comme un jeu vidéo. Ou non ?
Besoin de robots autonomes
Depuis la terre, vous ne pouvez pas conduire un robot qui est sur Mars. Deux sont les principales raisons qui rendent impossible:
1) Retard de communication: Compte tenu des positions relatives de Mars et de la Terre, un signal prend entre 8 et 42 minutes à se déplacer.
2) Communication périodique: La communication entre la Terre et Mars se fait par des sondes situées dans l'orbite de Mars. Ces sondes doivent être orientées vers la Terre pour pouvoir émettre des informations. Par conséquent, la communication avec le robot ne peut pas être continue.
Ainsi, la télécommande ne suffit pas. Nous avons besoin de quelque chose de plus avancé si nous voulons réussir. La clé est l'autonomie.
Bien que le concept d'autonomie soit applicable à de nombreuses fonctions des robots, nous nous concentrerons sur une capacité : autonomie de la mobilité ou navigation autonome. Cette compétence est absolument fondamentale pour qu'un robot sur une autre planète soit utile.
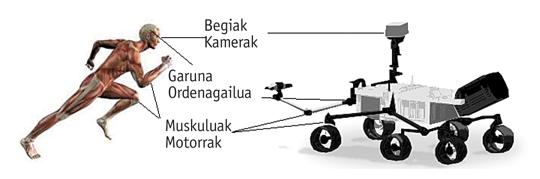
Les êtres humains ont cette compétence. Pour cela, il est indispensable de détecter l'environnement (les sens), d'essayer ce qui est perçu (le cerveau), de prendre des décisions sur l'interprétation (le cerveau) et d'exécuter ces décisions (les muscles). On a beaucoup travaillé pour doter les robots des mêmes capacités. Le résultat est montré dans la figure 3: au lieu des yeux, Curiosity a des caméras; au lieu du cerveau, ordinateurs; et au lieu des muscles, il a des moteurs sur les roues. Par conséquent, nous avons tous les éléments nécessaires pour avoir une autonomie, mais maintenant nous manquons un pas de plus. Comment ces éléments peuvent-ils être utilisés pour que le robot navigue de manière autonome ?
Navigation autonome
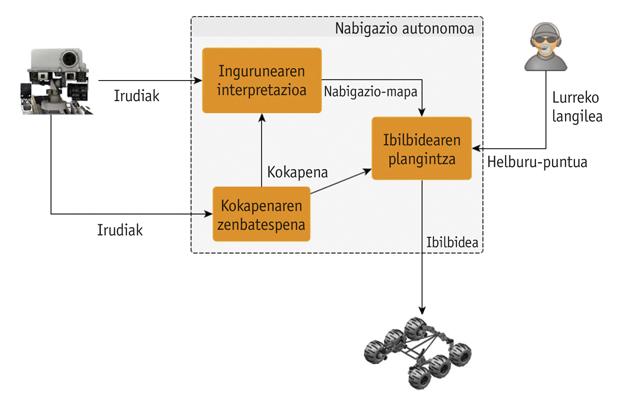
Nous sommes face à une capacité indispensable. Si un robot ne peut pas se déplacer pour explorer son environnement, il nous servira pour peu. La navigation autonome est définie comme la capacité de déplacement d'un point à l'autre d'un milieu, en évitant les obstacles. Dans le cas de Curiosity, le problème de la navigation est divisé en trois sous-blocs : interprétation de l'environnement, planification du parcours et estimation de son emplacement. Voyons voir un par un.
Interprétation de l'environnement
Comme notre robot est situé dans un environnement inconnu, il est nécessaire de détecter les objets qui l'entourent et les caractéristiques du sol avant d'effectuer tout mouvement. Si vous avez une pierre devant vous, vous ne devriez pas avancer parce que vous pouvez entrer en collision avec la pierre. Pour éviter la pierre, il est impératif d'interpréter les données que vous recevez de l'environnement.
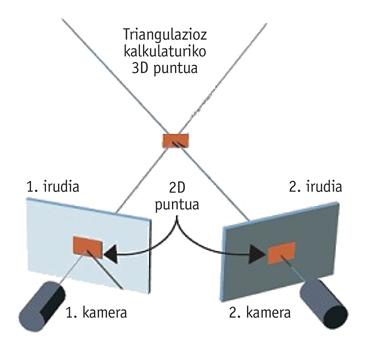
Pour ce faire, Curiosity utilise deux caméras et ce n'est pas un hasard. Si l'être humain a la vision en 3 dimensions, c'est parce que nous utilisons dans une large mesure deux yeux. Comme on peut le voir sur la figure 4, le même modèle a été suivi pour les robots. L'idée est simple. Les deux caméras dessinent deux images différentes du même environnement. Entre les deux images il y a un petit déplacement, une différence proportionnelle à la distance entre les caméras. La séparation d'un même point dans chaque image permet de calculer facilement, par triangulation, la position de ce point au milieu en 3 dimensions.
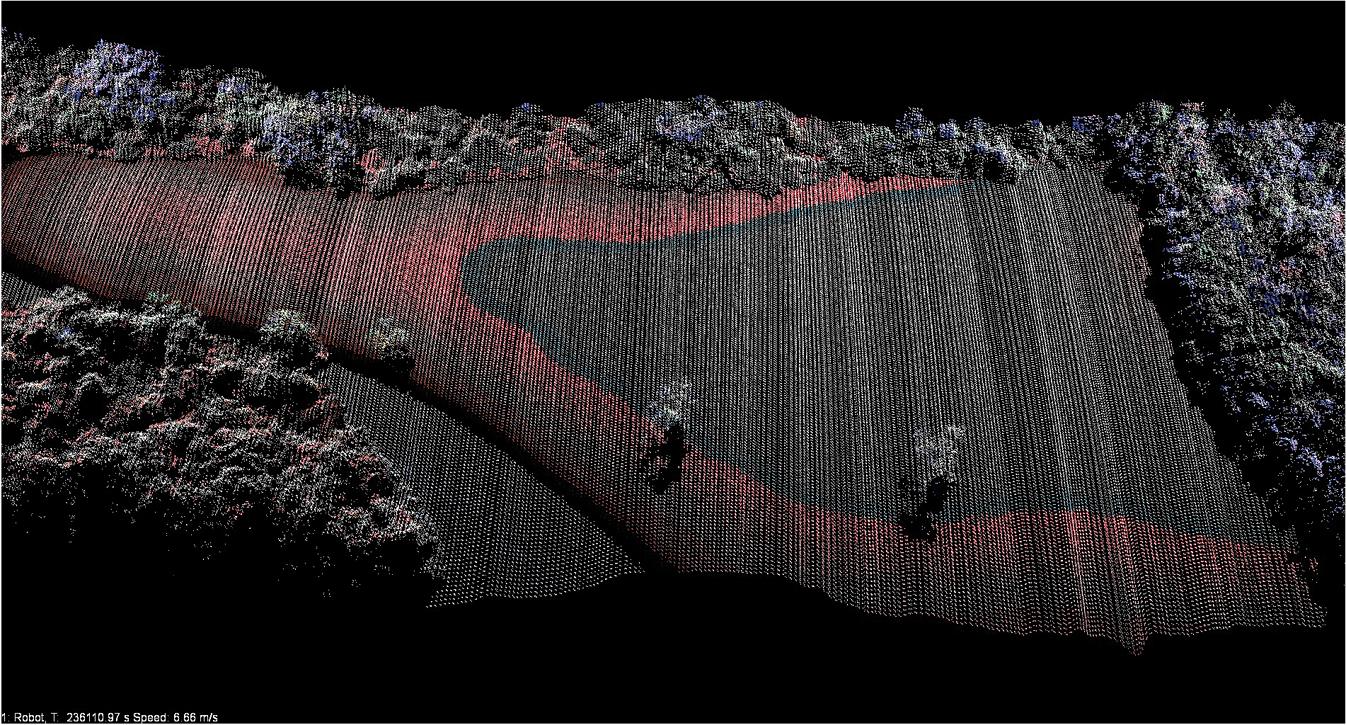
Si nous sommes en mesure d'associer de nombreux points sur les deux images, nous pouvons obtenir un nuage de points de l'environnement. Un nuage de points est un ensemble de points de 3 dimensions. Par exemple, la figure 5 montre un nuage de points obtenu dans une forêt. Curiosity obtient ce type de nuages de points sur Mars et son travail consiste à différencier les caractéristiques du milieu à travers ces nuages. Par exemple, endroits que vous ne pouvez pas traverser, boucles d'oreilles, trous, etc. Le résultat de ce processus est une carte de navigation de l'environnement dans lequel on distingue les zones navigables et non navigables.
Planification du parcours
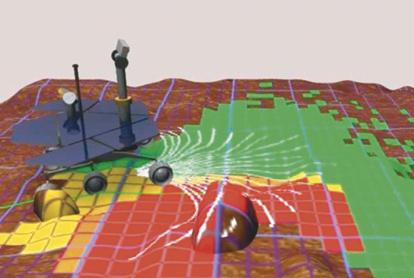
Comme les appareils GPS de la voiture, Curiosity calcule la route la plus courte de son endroit au point de destination. Cette planification se fait sur les cartes de navigation obtenues par caméra, comme le montre la figure 6. Pour ce faire, il prend en compte tous les chemins que le robot peut exécuter. Si ces itinéraires entrent dans des zones non navigables, ils sont écartés. Parmi les chemins possibles, le nombre de mouvements est minimisé et ceux qui sont les plus éloignés des barrières sont sélectionnés, en utilisant des algorithmes de recherche.
Estimation de localisation
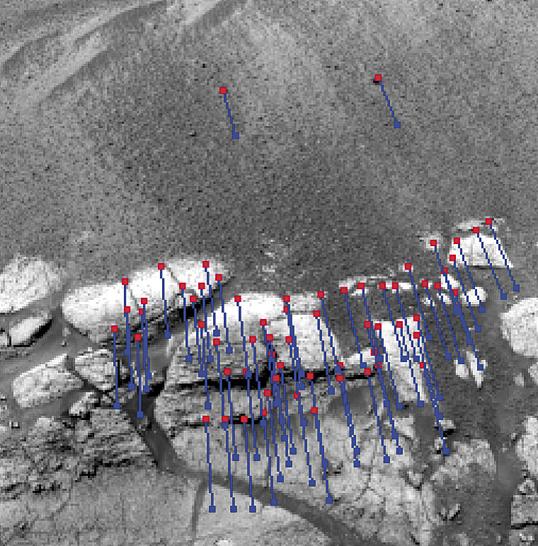
La navigation n'est pas possible si nous ne savons pas où nous sommes avec notre point objectif. S'ils nous envoient d'avancer 10 mètres à l'endroit où nous nous trouvons, il est impératif de savoir à tout moment combien nous avons déplacé du point de départ et donc où nous sommes par rapport à l'objectif. La meilleure façon de mesurer ces déplacements est par odométrie visuelle. Encore une fois, deux caméras séparent beaucoup de points importants de l'environnement et calculent leurs coordonnées en 3 dimensions. Quand une nouvelle image arrive, les mêmes points que l'image précédente sont identifiés et leur décalage est mesuré par rapport à l'image ancienne. Ainsi, comme ce déplacement est la conséquence du mouvement du robot, le déplacement réel du robot est calculé. Le résultat de ce processus est affiché dans la figure 7.
En combinant les trois capacités décrites, Curiosity permet à Mars de se déplacer et d'aller à la casaque dans les zones commandées par le personnel de la Terre. La figure 8 montre une description résumée du processus.
Futur
De grands projets sont en cours pour en savoir plus sur Mars. Le Mars Sample Return 1 est peut-être le plus attrayant. En particulier, NASA et ESA (Agence spatiale européenne) collaborent pour envoyer un nouveau robot à Mars et apporter à la Terre les échantillons qu'il recueille. Pour cette tâche, le nouveau robot doit avoir un plus grand degré d'autonomie.
La mission aura une durée déterminée, puisque le retour de l'emballage envoyé à Mars est plus difficile au fil du temps. Par conséquent, le robot doit avoir la capacité de réaliser des cartes complètes de son environnement. Vous devez vous souvenir des parcours effectués depuis le navire jusqu'au point de collecte des échantillons pour une planification plus rapide. Pour une meilleure navigation, vous devez connaître les caractéristiques du sol à travers la vue: si elle est sable ou boue, pour éviter les zones glissantes, etc.
Tout cela a déjà été réalisé sur Terre, pourquoi pas sur Mars ? La raison principale est que les ordinateurs envoyés dans l'espace ont leurs limites. En raison des changements de température, de rayonnement et de consommation d'énergie, les deux ordinateurs de Curiosity ont la capacité des ordinateurs qui étaient dans nos maisons il y a 10 ans. Et c'est très difficile d'obtenir le niveau d'autonomie dont ils ont besoin.
Par conséquent, il y a beaucoup à faire sur les ordinateurs spatiaux et l'efficacité des algorithmes. Et ce travail sera fait. Plus de robots seront envoyés à la planète rouge et à d'autres. Ils seront nos explorateurs et nos antécédents. Car un jour, l'homme atteindra ces mondes fascinants au-delà de la Terre.
Bibliographie Bibliographie
Zu idazle
Zientzia aldizkaria

