Lurraz haragoko esploratzaileak
Ikertzailea eta irakaslea
Euskal Herriko Unibertsitateko Informatika Fakultatea
Martera bidaiatzeak dituen arriskuak eta arrazoi ekonomikoak direla medio, gizakiak ezin izan du bertara iritsi oraindik. Baina bere ordez, jada bidali ditu esploratzaile berezi batzuk: robotak .
1997an, NASAren lehen robota iritsi zen Martera: Sojourner robota. 2004an, berriz, bi robot biki iritsi ziren planeta gorria ikuskatzera: Spirit eta Opportunity . Hasiera batean haien misioak 3 hilabete iraun behar bazuen ere, Opportunity oraindik ere lanean ari da! Spirit ek, bestalde, 2010ean bidali zuen bere azken seinalea.
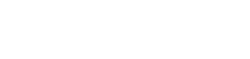
Azkenik, 2012. urteko abuztuan, Curiosity robota iritsi zen Martera (ikus 1. irudia). Curiosity bere aurrekarien anaia zahartzat jo dezakegu. Teknologikoki aurreratuagoa, tamainaz ere handiagoa, jada ari da Marteko lurrazala eta eguratsa aztertzen, eskura dituen sentsore eta aparatu guztiak erabiliz.
Marteko laborategi zientifikoa
Curiosity ez da robot bat soilik; asmo handiko helburu zientifikoak dituen laborategi osatu bat da. Helburu hauek ditu:
· Marten inoiz bizi-formarik egon den zehaztea.
· Marteko klima ezagutzea.
· Marteko geologia aztertzea.
· Gizakien etorkizuneko bidaiak prestatzen laguntzea.
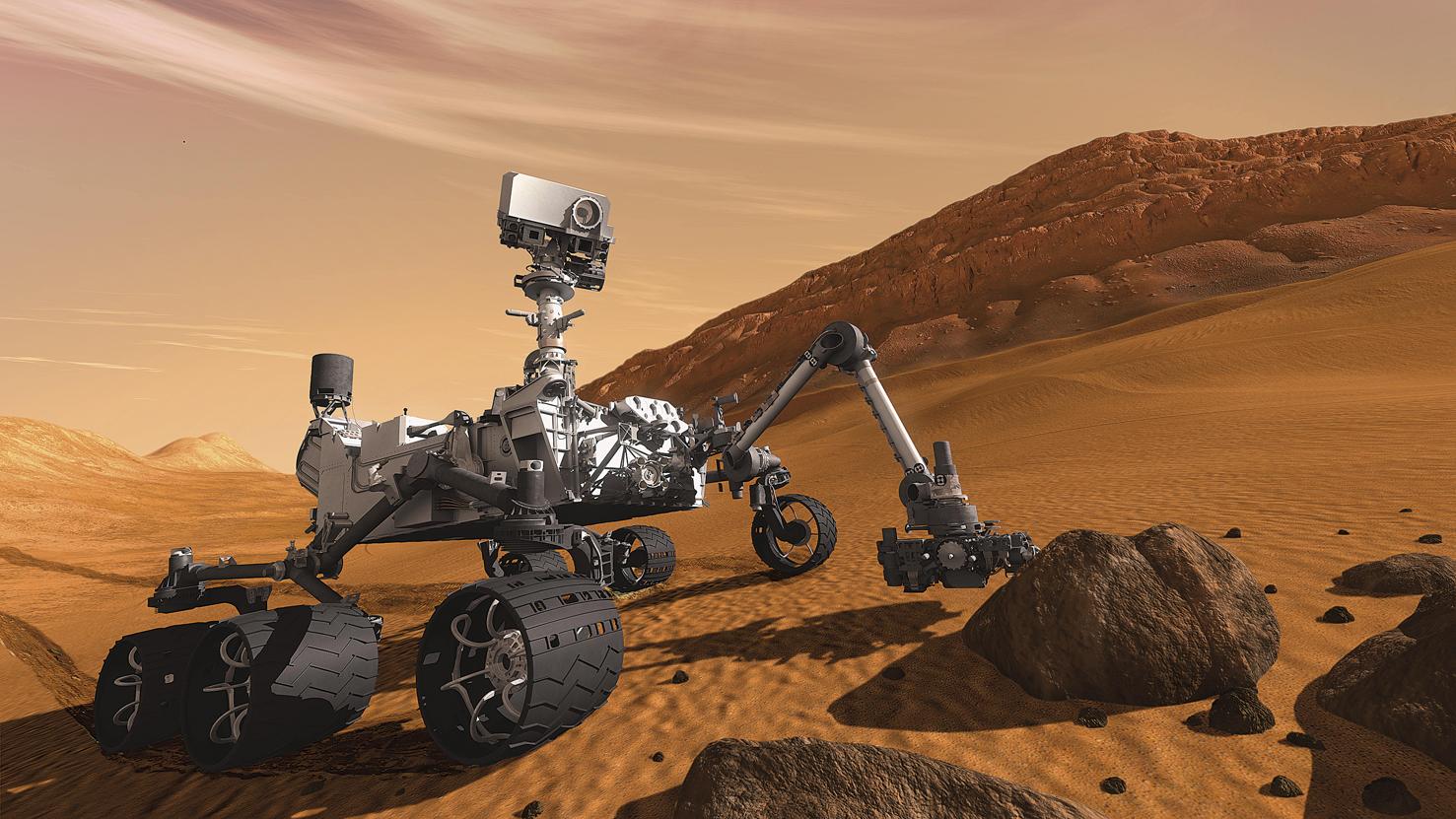
Lana behar bezala egiteko, robota laborategi mugikorra bilakatu dute, eta maila goreneko ekipamenduz hornitu. 2. irudian ikusten dira robotaren gailu nagusiak. Laburbilduz, Curiosity k hainbat helburutako 17 kamera ditu, Lurrarekin komunikatzeko antenak, sentsorez hornituriko beso robotiko bat, eta hamaika aparatu lurzoruko laginak aztertzeko. Aipatzekoak dira, batez ere, ura detektatzeko DAN gailua eta klima aztertzeko estazioa ( REMS ).
Hori guztia ikaragarria izateaz gain, Curiosity k han-hemenka ibiltzeko gaitasuna behar du gailu horiek beren lana egin, datu mordoxka bat bildu eta Lurreko ikertzaileei helarazteko. Hots, gure robotak Marten zehar mugitu behar du, leku interesgarrienetara heldu eta han bere aparatuak martxan jartzeko. Noski, horretarako ditu sei gurpilak. Baita beso robotiko bat ere. Beraz, badirudi nahikoa litzatekeela Lurrean pertsona bat izatea, Curiosity ren kamerak jasotzen duten informazioarekin robota gidatzen dakiena. Bideo-joko baten modukoa izango litzateke. Ala ez?
Robot autonomoen beharra
Lurretik ezin da Marten dagoen robot bat gidatu. Bi arrazoi nagusik egiten dute ezinezko:
1) Komunikazio-atzerapena: Marteren eta Lurraren posizio erlatiboak kontuan hartuz, seinale batek 8-42 minutu behar du joan-etorria egiteko.
2) Aldizkako komunikazioa: Lurraren eta Marteren arteko komunikazioa Marteren orbitan dauden zunda batzuen bitartez egiten da. Zunda horiek Lurrera begira egon behar dute informazioa igorri ahal izateko. Ondorioz, robotarekin komunikazioa ezin da etengabea izan.
Gauzak horrela, urrutiko kontrola ez da nahikoa. Zerbait aurreratuagoa behar dugu arrakastarik izan nahi badugu. Gakoa autonomia da.
Nahiz eta autonomiaren kontzeptua roboten funtzio askori aplika dakiokeen, gaitasun batean zentratuko dugu guk: mugikortasunaren autonomia edo nabigazio autonomoa . Trebetasun hori guztiz oinarrizkoa da beste planeta batean dagoen robot bat erabilgarria izan dadin.
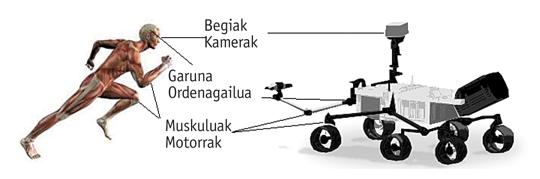
Gizakiok badugu aipaturiko trebetasun hori. Horretarako, ezinbestekoa zaigu, ordea, ingurunea hautematea (zentzumenak), hautemandakoa intepretatzea (garuna), interpretatutakoaren gainean erabakiak hartzea (garuna) eta erabaki horiek exekutatzea (muskuluak). Lan handia egin da robotei ere gaitasun berak emateko. Emaitza 3. irudian dugu: begien ordez, Curiosity k kamerak ditu; garunaren ordez, ordenagailuak; eta muskuluen ordez, motorrak ditu gurpiletan. Beraz, baditugu autonomia izateko behar ditugun elementu guztiak, baina orain beste pauso bat falta zaigu. Nola erabil daitezke elementu horiek robotak modu autonomoan nabiga dezan?
Nabigazio autonomoa
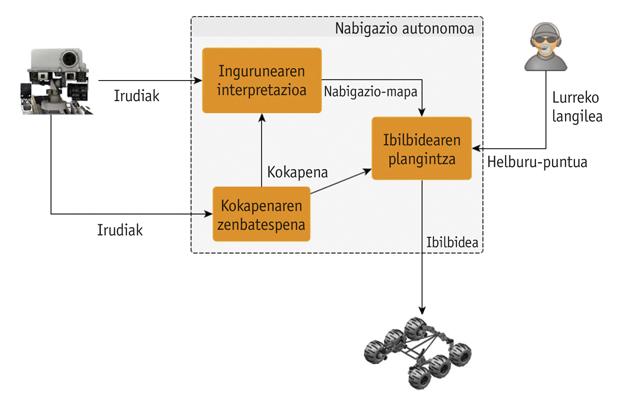
Ezinbesteko gaitasun baten aurrean gaude. Robot bat ezin bada mugitu bere ingurunea miatzeko, ezer gutxirako balioko digu. Ingurune bateko puntu batetik beste puntu batera oztopoak saihestuz mugitzeko gaitasun gisa definitzen da nabigazio autonomoa. Curiosity ren kasuan, nabigazioaren arazoa hiru azpiblokeetan zatitzen da: ingurunearen interpretazioa, ibilbidearen plangintza eta kokapenaren zenbatespena . Ikus ditzagun banan-banan.
Ingurunearen interpretazioa
Gure robota ingurune ezezagun batean dagoenez, nahitaezkoa zaio inguruan dituen objektuak eta lurzoruaren ezaugarriak hautematea edozein mugimendu egin aurretik. Aurrean harri bat badu, ez luke aurrera jo behar harriarekin talka egin baitezake. Harria saihesteko, ezinbestekoa du ingurunetik jasotzen dituen datuak interpretatzea.
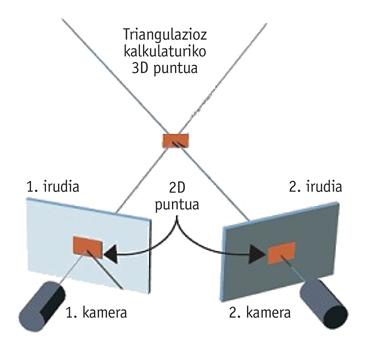
Horretarako, Curiosity k bi kamera erabiltzen ditu, eta ez da halabeharrez. Gizakiok 3 dimentsioko ikusmena badugu, bi begi erabiltzen ditugulako da, hein handi batean. 4. irudian ikus daitekeenez, robotentzat ere eredu berari jarraitu zaio. Ideia sinplea da. Bi kamerek ingurune beraren bi irudi ezberdin egiten dituzte. Bi irudien artean desplazamendu txiki bat dago, kameren arteko distantziarekin proportzionala den alde bat. Irudi bakoitzean puntu bera bereiziz gero, oso erraz kalkulatzen da, triangulazio bidez, puntu horrek ingurunean duen 3 dimentsioko posizioa.
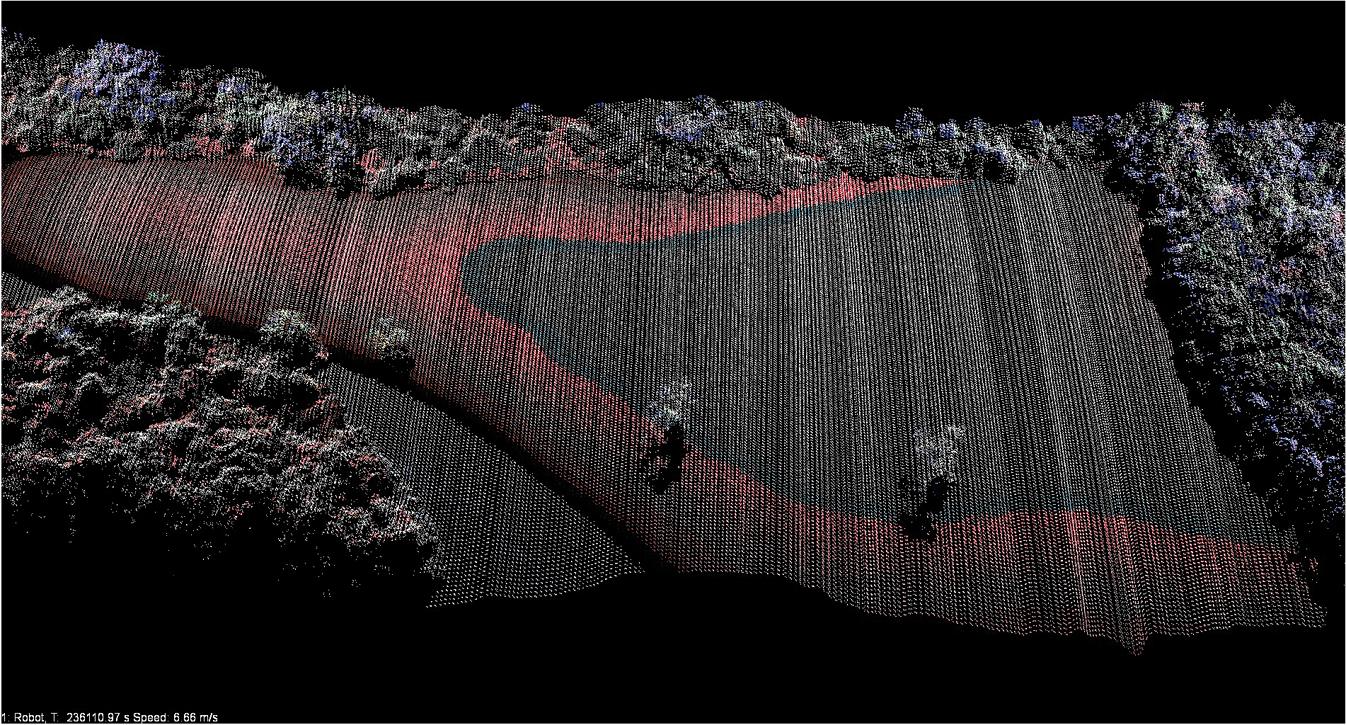
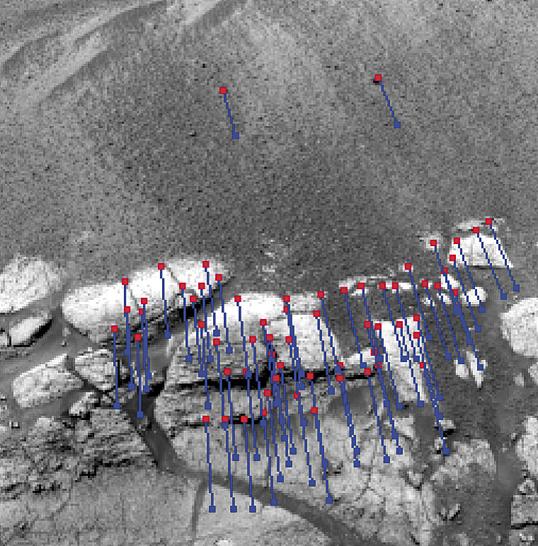
Bi irudietan puntu asko parekatzeko gai bagara, ingurunearen puntu-laino bat lor dezakegu. Puntu-laino bat 3 dimentsioko puntu-multzo bat da. Adibide gisara, 5. irudian baso batean lortutako puntu-laino bat dugu. Curiosity k modu horretako puntu-lainoak lortzen ditu Marten, eta haren lana da ingurunearen ezaugarriak ezberdintzea laino horien bitartez. Adibidez, zeharkatu ezin dituen tokiak, maldak, zuloak eta abar. Prozesu horren emaitza da ingurunearen nabigazio-mapa bat, non eremu nabigagarriak eta ez-nabigagarriak bereizten baitira.
Ibilbidearen plangintza
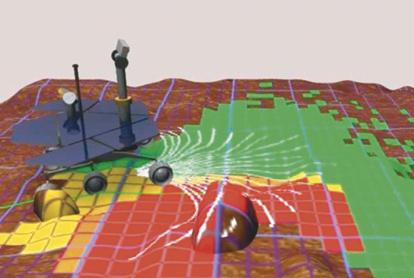
Autoetako GPS gailuek egiten duten antzera, Curiosity k ere biderik laburrena kalkulatzen du bere tokitik helburu-puntura. Plangintza hori kameren bidez lortutako nabigazio-mapen gainean egiten du, 6. irudian ikus daitekeenez. Horretarako, robotak exekuta ditzakeen ibilbide denak kontuan hartzen ditu. Ibilbide horiek eremu ez-nabigagarrietan sartzen badira, alde batera uzten dira. Ibilbide posibleen artean, mugimendu-kopurua minimizatu eta oztopoetatik urrunen daudenak aukeratzen dira, bilaketa-algoritmoak erabiliz.
Kokapenaren zenbatespena
Nabigazioa ez da posible ez baldin badakigu non gauden gure helburu puntuarekiko. Gauden lekutik 10 metro aurrera egiteko agintzen badigute, ezinbestean jakin behar dugu une oro zenbat desplazatu garen hasierako puntutik, eta, beraz, non gauden helburuarekiko. Desplazamendu horiek neurtzeko modurik onena ikusmen bidezko odometria erabiltzea da. Beste behin, bi kameraz baliatuz inguruneko puntu esanguratsu pilo bat bereizi eta beraien 3 dimentsioko koordenatuak kalkulatzen dira. Irudi berri bat iristen denean, lehengo irudiko puntu berak identifikatzen dira eta irudi zaharrarekiko izan duten desplazamendua neurtzen da. Hala, bada, desplazamendu hori robotaren mugimenduaren ondorio denez, robotaren benetako desplazamendua kalkulatzen da. Prozesu horren emaitza 7. irudian dakusagu.
Azaldutako hiru gaitasun horiek konbinatuz lortzen du Curiosity k Marten mugitzea eta Lurreko langileek agindutako lekuetara bere kasaka joatea. Prozesuaren deskribapen laburtu bat ikusten da 8. irudian.
Etorkizuna
Marte sakonago ezagutzeko egitasmo handiak daude martxan. Beharbada erakargarriena Mars Sample Return 1 deritzona da. Hain zuzen, NASA eta ESA (Europako Espazio Agentzia) elkarlanean ari dira robot berri bat Martera bidali eta han biltzen dituen laginak Lurrera ekartzeko. Zeregin horretarako robot berriak autonomia-maila handiagoa izan beharko du.
Misioa epe jakin baterako izango da, Martera bidalitako ontzia itzularaztea zailagoa baita denbora pasatzen den heinean. Hori dela eta, robotak bere ingurunearen mapa osatuak egiteko gaitasuna izan beharko du. Ontzitik laginak bildu dituen lekuraino egin dituen ibilbideak gogoratu beharko ditu, plangintza azkarragoak lortzeko. Nabigazioa hobea izateko, lurzoruaren ezaugarriak ezagutu beharko ditu ikusmena erabiliz: harea ala lokatza den, ingurune irristakorrak saihesteko eta abar.
Hori guztia lortu da jada Lurrean; beraz, zergatik ez Marten? Arrazoi nagusi bat dago: espaziora bidaltzen diren ordenagailuek dituzten mugak. Tenperatura-aldaketak, erradiazioa eta energia-kontsumoa direla medio, Curiosity ren bi ordenagailuek gure etxeetan orain dela 10 urte zeuden ordenagailuen ahalmena dute. Eta, horrela, oso zaila da behar duten autonomia-maila lortzea.
Ondorioz, espaziorako ordenagailuetan eta algoritmoen eraginkortasunean lan handia dago egiteko. Eta lan hori egingo da. Robot gehiago bidaliko dira, bai planeta gorrira, bai beste batzuetara. Haiek izango dira gure esploratzaile eta aurrekariak. Egunen batean gizakia bera ere iritsiko delako Lurraz haragoko mundu liluragarri horietara.
Bibliografia
Idatzi zuk zeuk Gai librean atalean
Gai librean aritzeko, bidali zure artikulua aldizkaria@elhuyar.eus helbidera
Hauek dira Gai librean atalean Idazteko arauak
Zu idazle
Zientzia aldizkaria