

Transterrestres explorers
Ikertzailea eta irakaslea
Euskal Herriko Unibertsitateko Informatika Fakultatea
The risks of traveling to Mars and economic reasons have made the human being still unable to reach it. But instead he has already sent some special explorers: robots.
The first NASA robot arrived on Mars in 1997: Robot Sojourner. In 2004 two twin robots arrived to inspect the red planet: Spirit and Opportunity . Although initially his mission should last 3 months, Opportunity still works! Spirit, for his part, sent his last signal in 2010.
Finally, in August 2012 the robot Curiosity arrived on Mars (see figure 1). Curiosity can be considered the elder brother of his background. More technologically advanced, larger, it is already studying the terrestrial surface and atmosphere of Mars, using all sensors and devices at your fingertips.
Scientific laboratory of Mars
Curiosity is not just a robot, it is a complete laboratory with ambitious scientific objectives. Its objectives are:
· Determine if there has been any form of life on Mars.
· Know the climate of Mars.
· Study of Martian geology.
· Collaborate in the preparation of future human trips.
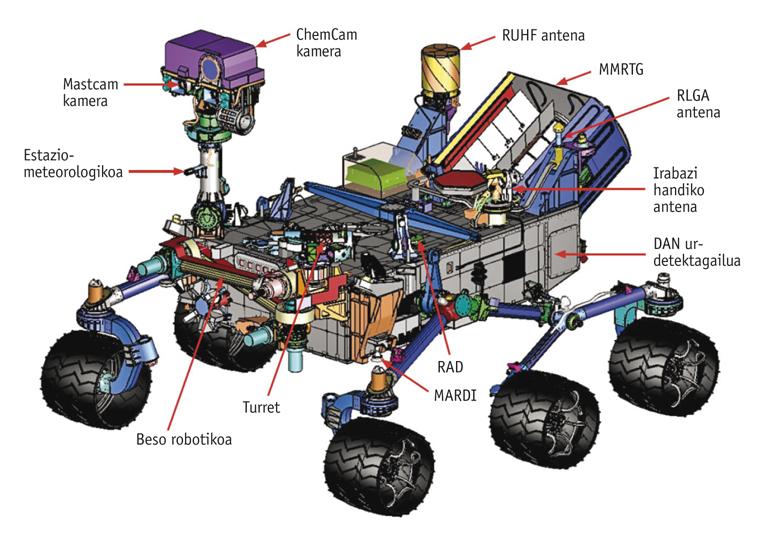
For the good performance of the work, the robot has become a mobile laboratory, equipped with equipment of maximum level. Figure 2 shows the main devices of the robot. In summary, Curiosity has 17 cameras with different objectives, communication antennas with Earth, a robotic arm with sensors and eleven devices for the analysis of soil samples. Particularly noteworthy are the DAN water detection device and the climate study station (REMS).
In addition to all this being tremendous, Curiosity needs the ability to move to do its job, collect a lot of data and get them to Earth researchers. That is, our robot must move through Mars to get to the most interesting places and launch there its gadgets. Of course, for that it has the six wheels. Also a robotic arm. Therefore, it seems that it would be enough to have a person on Earth who knows how to drive the robot with the information that Curiosity cameras receive. It would be like a video game. Or not?
Need for autonomous robots
From the earth you cannot drive a robot that is on Mars. Two are the main reasons that make it impossible:
1) Delay in communication: Taking into account the relative positions of Mars and Earth, a signal takes between 8 and 42 minutes to move.
2) Periodic communication: Communication between Earth and Mars is done through probes located in the orbit of Mars. These probes must be oriented to the Earth in order to emit information. Consequently, communication with the robot cannot be continuous.
So things, the remote control is not enough. We need something more advanced if we want to succeed. The key is autonomy.
Although the concept of autonomy is applicable to many of the functions of robots, we will focus on a capacity: autonomy of mobility or autonomous navigation. This ability is absolutely basic for a robot that is on another planet to be useful.
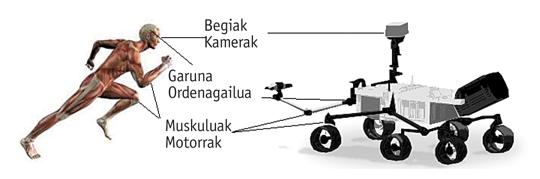
Human beings have that ability. To do this, it is essential to detect the environment (the senses), test the perceived (the brain), make decisions about the interpreted (the brain) and execute those decisions (the muscles). Much has been worked to provide robots with the same capabilities. The result is shown in figure 3: instead of the eyes, Curiosity has cameras; instead of the brain, computers; and instead of the muscles, it has engines in the wheels. Therefore, we have all the elements necessary to have autonomy, but now we need one more step. How can these elements be used for the robot to navigate autonomously?
Autonomous navigation Autonomous navigation
We are facing an essential capacity. If a robot cannot move to explore its surroundings, it will serve us for little. Autonomous navigation is defined as the displacement capacity of one point to another of a medium, avoiding obstacles. In the case of Curiosity, the navigation problem is divided into three subblocks: interpretation of the environment, planning of the route and estimation of its location. Let's see it one by one.
Interpretation of the environment
Since our robot is located in an unknown environment, it is necessary to detect objects that surround it and soil characteristics before performing any movement. If you have a stone in front, you should not advance because you can collide with the stone. To avoid the stone it is essential to interpret the data it receives from the environment.
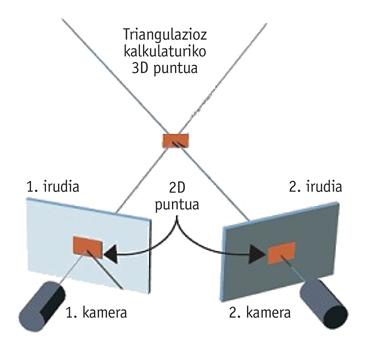
To do this, Curiosity uses two cameras and it is no coincidence. If the human being has vision in 3 dimensions, it is because we greatly use two eyes. As can be seen in figure 4, the same model has been followed for robots. The idea is simple. Both cameras draw two different images of the same environment. Between both images there is a small displacement, a proportional difference to the distance between cameras. The separation of the same point in each image allows to easily calculate, by triangulation, the position of this point in the middle in 3 dimensions.
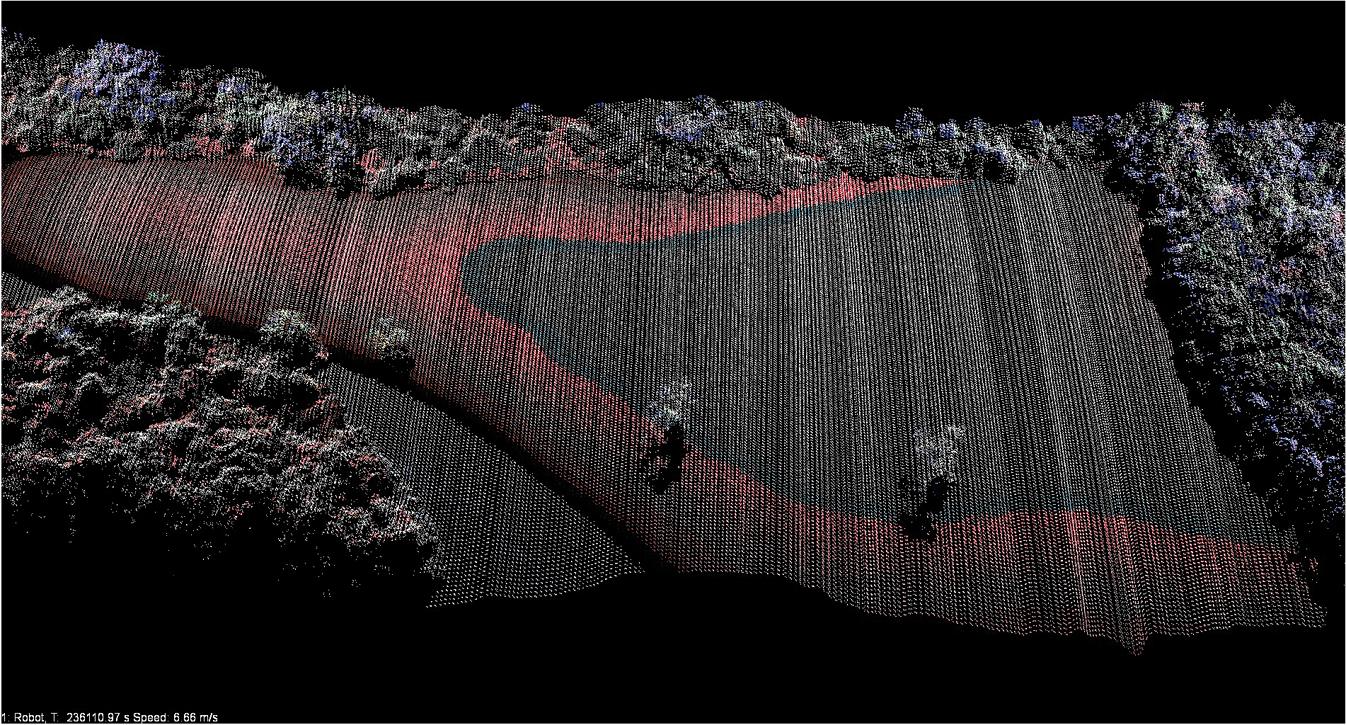
If we are able to match many points in both images, we can get a cloud of points from the environment. A point cloud is a set of 3-dimensional points. As an example, figure 5 shows a cloud of points obtained in a forest. Curiosity gets this kind of point clouds on Mars and her job is to differentiate the characteristics of the medium through these clouds. For example, places that cannot cross, slopes, holes, etc. The result of this process is a navigation map of the environment in which the navigable and non-navigable zones are distinguished.
Planning of the route
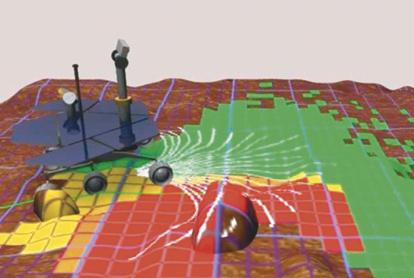
Like car GPS devices, Curiosity calculates the shortest route from its place to the destination point. This planning is carried out on the navigation maps obtained by cameras, as shown in figure 6. To do this, take into account all the routes that the robot can run. If these routes enter non-navigable zones they are discarded. Among the possible routes, the number of movements is minimized and those that are farther away from the barriers are selected, using search algorithms.
Estimation of location
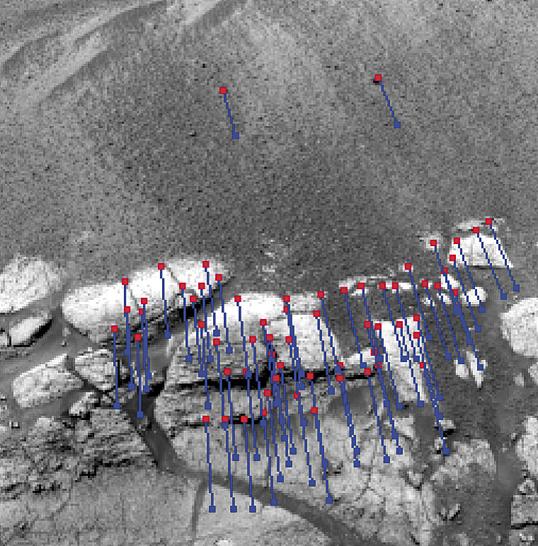
Navigation is not possible if we do not know where we are with our target point. If we are sent to advance 10 meters through the place where we are, it is essential to know at all times how much we have moved from the starting point and, therefore, where we are regarding the objective. The best way to measure these displacements is by visual odometry. Once again, through two cameras a lot of significant points are separated from the environment and their coordinates are calculated in 3 dimensions. When a new image arrives, the same points are identified as in the previous image and its displacement is measured with respect to the old image. Thus, since this displacement is a consequence of the movement of the robot, the actual displacement of the robot is calculated. The result of this process is shown in figure 7.
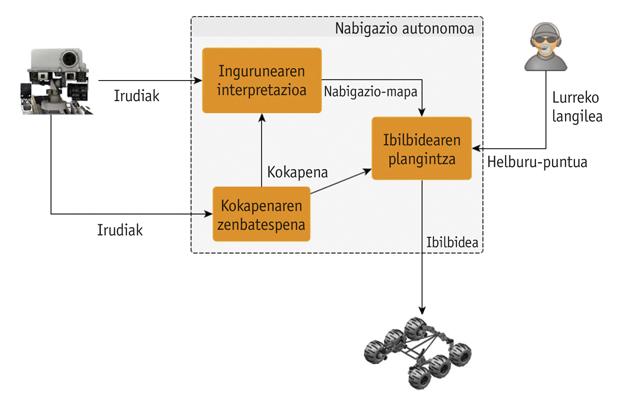
Combining the three capacities described, Curiosity gets Mars to move and go to hut to the areas ordered by Earth's staff. Figure 8 shows a summary description of the process.
Future of the future
There are big projects underway to get to know more about Mars. Perhaps the most attractive is the Mars Sample Return 1. Specifically, NASA and ESA (European Space Agency) collaborate to send a new robot to Mars and bring the samples collected there to Earth. For this task the new robot must have a greater degree of autonomy.
The mission will have a certain duration, since the return of the container sent to Mars is more difficult as time elapses. Therefore, the robot must have the capacity to make complete maps of its environment. You must remember the routes you have made from the vessel to the collection point of the samples to achieve a faster planning. For better navigation, you should know the characteristics of the soil through the view: if it is sand or mud, to avoid slippery areas, etc.
All this has already been achieved on Earth, why not on Mars? The main reason is that computers that are sent to space have their limitations. Due to changes in temperature, radiation and energy consumption, the two Curiosity computers have the capacity of computers that were in our homes 10 years ago. And so it is very difficult to achieve the level of autonomy they need.
Consequently, there is much to do in space computers and in the efficiency of algorithms. And that work will be done. More robots will be sent to both the red planet and others. They will be our explorers and background. Because someday man will come to those fascinating worlds beyond the Earth.
Bibliography Bibliography Bibliography
Zu idazle
Zientzia aldizkaria

