

Exploradores transterrestres
Ikertzailea eta irakaslea
Euskal Herriko Unibertsitateko Informatika Fakultatea
Los riesgos de viajar a Marte y las razones económicas han hecho que el ser humano aún no pueda llegar a ella. Pero en su lugar ya ha enviado a unos exploradores especiales: robots.
En 1997 llega a Marte el primer robot de la NASA: Robot Sojourner. En 2004 llegaron dos robots gemelos a inspeccionar el planeta rojo: Spirit y Opportunity . Aunque inicialmente su misión debía durar 3 meses, ¡Opportunity sigue trabajando! Spirit, por su parte, envió su última señal en 2010.
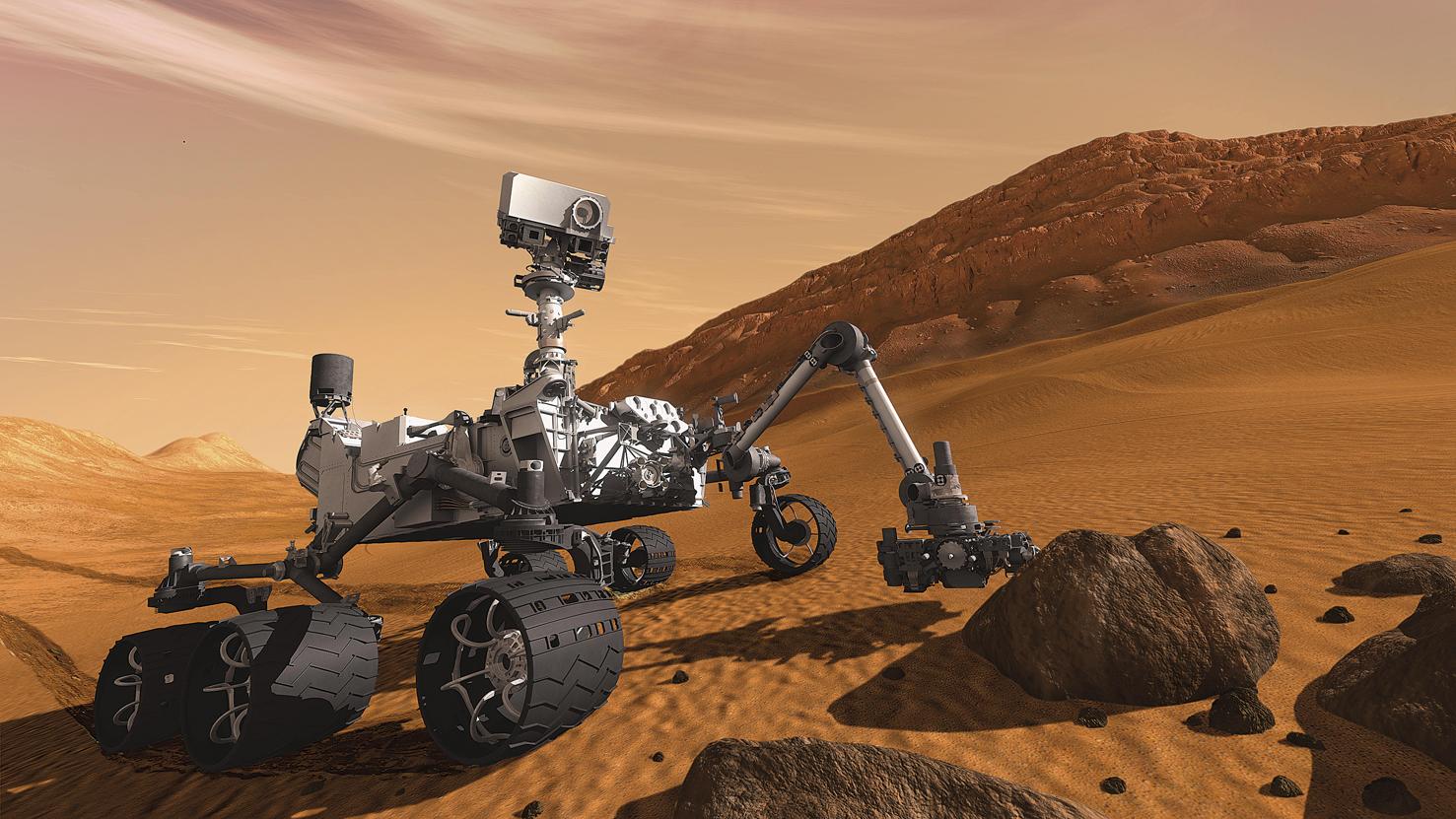
Finalmente, en agosto de 2012 llegó a Marte el robot Curiosity (ver figura 1). Curiosity puede ser considerado el hermano mayor de sus antecedentes. Más avanzada tecnológicamente, de mayor tamaño, ya está estudiando la superficie terrestre y la atmósfera de Marte, utilizando todos los sensores y aparatos a su alcance.
Laboratorio científico de Marte
Curiosity no es sólo un robot, es un laboratorio completo con ambiciosos objetivos científicos. Sus objetivos son:
· Determinar si ha habido alguna forma de vida en Marte.
· Conocer el clima de Marte.
· Estudio de la geología marciana.
· Colaborar en la preparación de futuros viajes humanos.
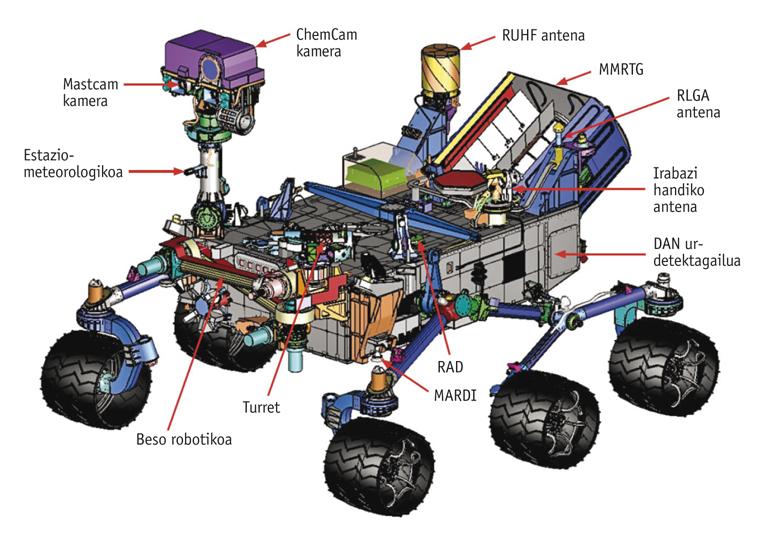
Para el buen desempeño del trabajo, el robot se ha convertido en un laboratorio móvil, dotado de equipos de máximo nivel. En la figura 2 se muestran los principales dispositivos del robot. En resumen, Curiosity cuenta con 17 cámaras con diferentes objetivos, antenas de comunicación con la Tierra, un brazo robótico con sensores y once aparatos para el análisis de muestras de suelo. Destacan sobre todo el dispositivo de detección de agua DAN y la estación de estudio climático (REMS).
Además de que todo esto sea tremendo, Curiosity necesita la capacidad de desplazarse para hacer su trabajo, recoger un montón de datos y hacerlos llegar a los investigadores de la Tierra. Es decir, nuestro robot debe moverse por Marte para llegar a los lugares más interesantes y poner en marcha allí sus aparatos. Por supuesto, para eso tiene las seis ruedas. También un brazo robótico. Por lo tanto, parece que bastaría con tener una persona en la Tierra que sepa conducir el robot con la información que reciben las cámaras de Curiosity. Sería como un videojuego. ¿O no?
Necesidad de robots autónomos
Desde la tierra no se puede conducir un robot que está en Marte. Dos son las razones principales que hacen imposible:
1) Retraso en la comunicación: Teniendo en cuenta las posiciones relativas de Marte y la Tierra, una señal tarda entre 8 y 42 minutos en desplazarse.
2) Comunicación periódica: La comunicación entre la Tierra y Marte se realiza mediante unas sondas situadas en la órbita de Marte. Estas sondas deben estar orientadas hacia la Tierra para poder emitir información. En consecuencia, la comunicación con el robot no puede ser continua.
Así las cosas, el control remoto no es suficiente. Necesitamos algo más avanzado si queremos tener éxito. La clave es la autonomía.
Aunque el concepto de autonomía es aplicable a muchas de las funciones de los robots, nosotros nos centraremos en una capacidad: autonomía de la movilidad o navegación autónoma. Esta habilidad es absolutamente básica para que un robot que está en otro planeta sea útil.
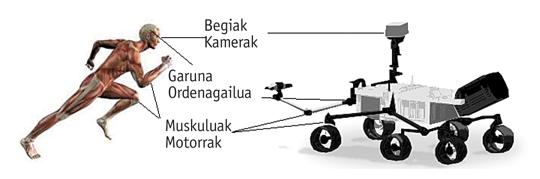
Los seres humanos tenemos esa habilidad. Para ello, es imprescindible detectar el entorno (los sentidos), ensayar lo percibido (el cerebro), tomar decisiones sobre lo interpretado (el cerebro) y ejecutar esas decisiones (los músculos). Se ha trabajado mucho para dotar a los robots de las mismas capacidades. El resultado se muestra en la figura 3: en lugar de los ojos, Curiosity tiene cámaras; en lugar del cerebro, ordenadores; y en lugar de los músculos, tiene motores en las ruedas. Por lo tanto, tenemos todos los elementos necesarios para tener autonomía, pero ahora nos falta un paso más. ¿Cómo se pueden utilizar estos elementos para que el robot navega de forma autónoma?
Navegación autónoma
Estamos ante una capacidad imprescindible. Si un robot no puede moverse para explorar su entorno, nos servirá para poco. La navegación autónoma se define como la capacidad de desplazamiento de un punto a otro de un medio, evitando obstáculos. En el caso de Curiosity, el problema de la navegación se divide en tres subbloques: interpretación del entorno, planificación del recorrido y estimación de su ubicación. Vamos a verlo uno a uno.
Interpretación del entorno
Dado que nuestro robot está situado en un entorno desconocido, es necesario detectar los objetos que le rodean y las características del suelo antes de realizar cualquier movimiento. Si tiene una piedra delante, no debería avanzar porque puede chocar con la piedra. Para evitar la piedra es imprescindible interpretar los datos que recibe del entorno.
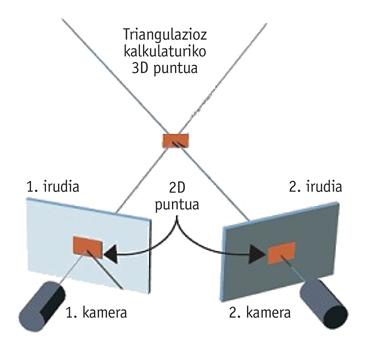
Para ello, Curiosity utiliza dos cámaras y no es casualidad. Si el ser humano tiene visión en 3 dimensiones, es porque utilizamos en gran medida dos ojos. Como se puede observar en la figura 4, para los robots se ha seguido el mismo modelo. La idea es sencilla. Ambas cámaras dibujan dos imágenes diferentes del mismo entorno. Entre ambas imágenes hay un pequeño desplazamiento, una diferencia proporcional a la distancia entre cámaras. La separación de un mismo punto en cada imagen permite calcular fácilmente, mediante triangulación, la posición de este punto en el medio en 3 dimensiones.
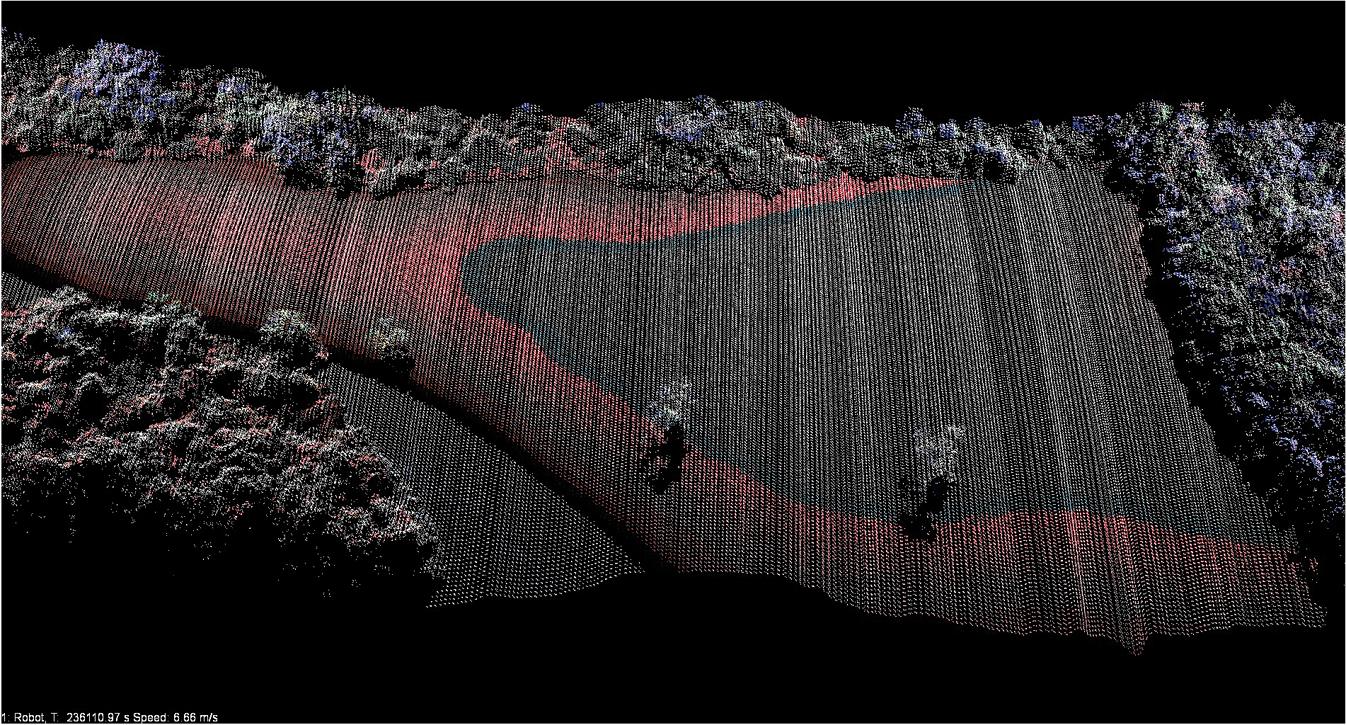
Si somos capaces de emparejar muchos puntos en ambas imágenes, podemos obtener una nube de puntos del entorno. Una nube de puntos es un conjunto de puntos de 3 dimensiones. A modo de ejemplo, en la figura 5 se muestra una nube de puntos obtenida en un bosque. Curiosity consigue este tipo de nubes de puntos en Marte y su trabajo consiste en diferenciar las características del medio a través de estas nubes. Por ejemplo, lugares que no puede atravesar, pendientes, agujeros, etc. El resultado de este proceso es un mapa de navegación del entorno en el que se distinguen las zonas navegables y las no navegables.
Planificación del recorrido
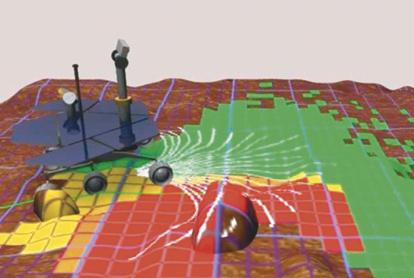
Al igual que los dispositivos GPS de los coches, Curiosity calcula la ruta más corta desde su lugar hasta el punto de destino. Esta planificación se realiza sobre los mapas de navegación obtenidos mediante cámaras, tal y como se muestra en la figura 6. Para ello, tiene en cuenta todas las rutas que el robot puede ejecutar. Si estas rutas entran en zonas no navegables se descartan. Entre las rutas posibles se minimiza el número de movimientos y se seleccionan las que se encuentran más alejadas de las barreras, utilizando algoritmos de búsqueda.
Estimación de localización
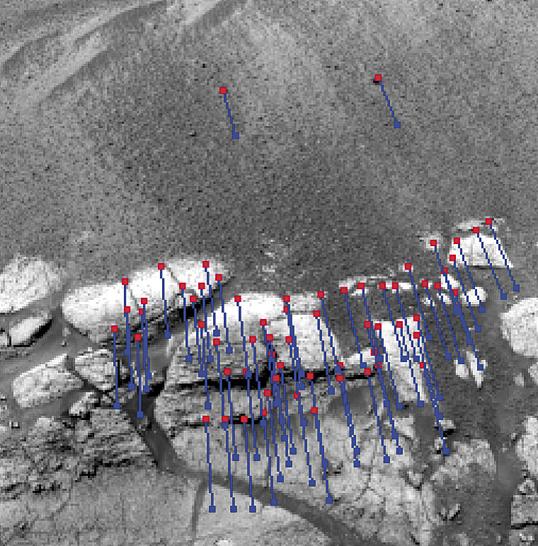
La navegación no es posible si no sabemos dónde estamos con nuestro punto objetivo. Si nos mandan avanzar 10 metros por el lugar en el que nos encontramos, es imprescindible saber en todo momento cuánto hemos desplazado desde el punto de partida y, por tanto, dónde estamos respecto al objetivo. La mejor forma de medir estos desplazamientos es mediante odometría visual. Una vez más, mediante dos cámaras se separa un montón de puntos significativos del entorno y se calculan sus coordenadas en 3 dimensiones. Cuando llega una nueva imagen se identifican los mismos puntos que en la imagen anterior y se mide su desplazamiento respecto a la imagen antigua. Así pues, como este desplazamiento es consecuencia del movimiento del robot, se calcula el desplazamiento real del robot. El resultado de este proceso se muestra en la figura 7.
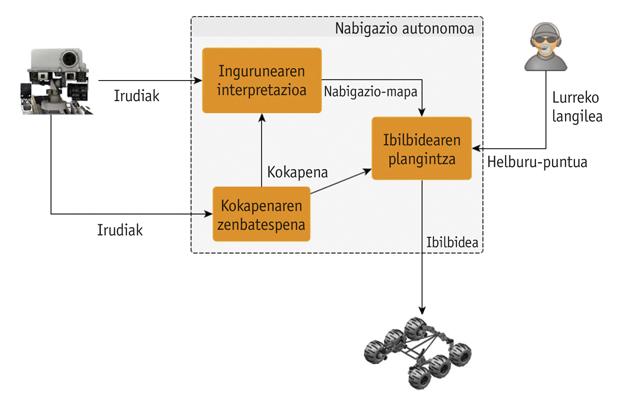
Combinando las tres capacidades descritas, Curiosity consigue que Marte se mueva y que acuda a casaca a las zonas ordenadas por el personal de la Tierra. La figura 8 muestra una descripción resumida del proceso.
Futuro
Hay en marcha grandes proyectos para conocer más a fondo Marte. Quizá el más atractivo es el Mars Sample Return 1. En concreto, NASA y ESA (Agencia Espacial Europea) colaboran para enviar un nuevo robot a Marte y traer a la Tierra las muestras que allí recoge. Para esta tarea el nuevo robot deberá tener un mayor grado de autonomía.
La misión tendrá una duración determinada, ya que la devolución del envase enviado a Marte es más difícil a medida que transcurre el tiempo. Por ello, el robot deberá tener la capacidad de realizar mapas completos de su entorno. Deberá recordar los recorridos que ha realizado desde el buque hasta el punto de recogida de las muestras para lograr una planificación más rápida. Para una mejor navegación, deberá conocer las características del suelo a través de la vista: si es arena o fango, para evitar zonas resbaladizas, etc.
Todo esto ya se ha conseguido en la Tierra, ¿por qué no en Marte? La razón principal es que los ordenadores que se envían al espacio tienen sus limitaciones. Debido a los cambios de temperatura, radiación y consumo energético, los dos ordenadores de Curiosity tienen la capacidad de los ordenadores que estaban en nuestros hogares hace 10 años. Y así es muy difícil conseguir el nivel de autonomía que necesitan.
En consecuencia, hay mucho que hacer en los ordenadores espaciales y en la eficiencia de los algoritmos. Y se hará ese trabajo. Se enviarán más robots tanto al planeta rojo como a otros. Ellos serán nuestros exploradores y antecedentes. Porque algún día el hombre llegará a esos fascinantes mundos más allá de la Tierra.
Bibliografía
Zu idazle
Zientzia aldizkaria

