

Historial de controladores
En definitiva, a técnica de control necesaria paira conducir o robot é coñecida desde hai tempo e pódese atopar en numerosos procesos industriais.
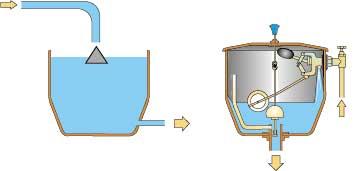
O estudo dos controladores que apareceron ao longo dos anos permite atopar elementos procedentes da antigüidade. Así, XVII. Até o século XX, os sistemas paira controlar o nivel de líquido dunha lámpada de aceite ou manter o nivel dun recipiente de viño (aínda que encha moitos vasos) son sistemas de control. Neste tipo de sistemas contrólase o nivel do fluído de control do fluxo, xa que o fluxo a través dun buraco é proporcional á presión. A ferramenta que se inventou antigamente paira controlar o nivel de fluído é un flotador que aínda se utiliza nos depósitos dos baños. A medida que diminúe o nivel de fluído, o fluxo de alimentación aumenta e cando aumenta o nivel, o fluxo de alimentación diminúe, eliminándoo no caso necesario. A figura 1 mostra a presentación desta ferramenta e o esquema dun depósito nos baños actuais. Neste sistema, o sensor e o accionamiento están combinados nun único dispositivo (flotador e tubo de alimentación).
XVII. e XIX. Un dos traballos aparecidos durante séculos é o control de temperatura no forno deseñado por Drebbell (1620) e paira quentar a incubadora de pitos. Na figura 2 preséntase o deseño deste control. O forno está formado por unha caixa con lume interno e un tubo con regulador de tiro. No interior da cámara de combustión pódese atopar una incubadora de pitos con dobre parede que enche de auga a separación entre estes muros. O sensor de temperatura é un recipiente de vidro cheo de alcol e mercurio situado no tramo mencionado.
A medida que o lume quenta a caixa e a auga, o alcol dilátase e o talo que leva o flotador ascende facendo descender o regulador de tiro cara ao tubo. Cando a caixa está demasiado fría, o alcol diminúe e ábrese o regulador e aumenta a forza do lume. A temperatura desexada vén dada pola lonxitude do talo que leva o flotador.
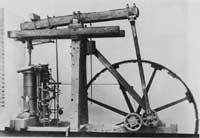
Nesta mesma época, o control da velocidade de rotación dos eixos era un problema urxente de control automático. Por exemplo, o control da velocidade da pedra dun muíño de vento que moenda o trigo é un control automático. Entre os diferentes métodos empregados, o mellor foi o péndulo cónico ou baseado no regulador de bólas. Este dispositivo utilizábase paira medir a velocidade do muíño. Pero a aplicación que fixo famoso este tipo de reguladores foi a máquina de vapor (Watt, 1788). Na figura 3 móstrase a fotografía e esquema desta máquina e na figura 4 móstrase o primeiro plano do regulador da bóla móbil.
A acción do regulador centrífugo é facilmente comprensible. Supoñamos que a máquina está a traballar no seu estado de equilibrio e de súpeto aplícaselle a carga. Nese momento redúcese a velocidade da máquina e redúcese o cono formado polas bólas do regulador. Así, o ángulo que forman as bólas coa vertical utilízase como sensor de saída. Esta acción consiste en abrir a válvula principal de vapor (accionamiento) e facer pasar máis vapor cara á máquina paira recuperar a velocidade perdida. Paira manter a válvula de vapor neste estado, as bólas do regulador deberán formar un ángulo diferente, polo que a velocidade obtida tras a aplicación da carga non será exactamente igual á anterior.
Watt foi un enxeñeiro práctico, que traballou cos muíños de vento antes, e non realizou unha análise teórica do regulador. XIX. A finais do século XX, os estudos do mencionado sistema de control pasaron de ser una mera práctica a ser o núcleo das análises teóricas. C.V. Airy foi profesor de matemáticas e astronomía na Universidade de Cambridge entre 1826 e 35 e astrónomo de Greenwich entre 1835 e 81. Airy, tras numerosos estudos sobre a velocidade, descubriu que o regulador do péndulo podía ter un movemento inestable. Airy é a primeira análise da inestabilidade dun sistema de control. A análise, baseado en ecuacións diferenciais, foi o inicio da análise do control de realimentación.
O primeiro traballo sistemático de estabilidade no control de realimentación foi “On Governos” de Maxwell (1868). Neste traballo, Maxwell desenvolveu as ecuacións diferenciais do regulador, linealizándolas ao redor do punto de equilibrio. Desta maneira, demostrou que a estabilidade está asociada ás raíces dunha ecuación, é dicir, que ditas raíces debían ter partes reais negativas.
O problema do criterio de estabilidade, E.J., gañador do Adams de 1877. Pódese ver que foi solucionado por Routh. O criterio desenvolvido no ensaio que serviu paira gañar o premio é a técnica que seguen aprendendo os enxeñeiros de control. A análise da ecuación característica seguiu sendo a base da teoría do control en Bell Telephone e H.S. Polas invencións de Black, até a aparición do amplificador electrónico realimentado en 1927.
A tras a aparición do traballo de Routh. M. O matemático ruso Lyapuntov comezou a estudar o problema da estabilidade do movemento e en 1892 empregou as ecuacións non lineais do movemento obtendo un resultado equivalente ao criterio de Routh. A súa obra foi moi importante, pero non apareceu escrita até 1958.
XX. Se nos penetramos no século XIX, a Primeira Guerra Mundial, do mesmo xeito que a súa importancia na mellora de todas as técnicas, tivo una gran influencia o uso de sistemas de control, como exemplo o desenvolvemento de amplificadores realimentados en 1945 H. W. Descríbese nun artigo escrito por Bode. Os amplificadores electrónicos permitiron realizar chamadas de longa distancia nas primeiras décadas da Primeira Guerra Mundial.
Con todo, a medida que aumenta a distancia, a perda de enerxía eléctrica tamén aumenta a pesar do gran diámetro do fío de ferro, e cada vez son máis os amplificadores necesarios paira evitar perdas. En consecuencia, tantos amplificadores distorsionaron debido á falta de linealidad dos tubos sen carga utilizados. A solución a este problema atopouna Black na realimentación: paira evitar a distorsión é necesaria una realimentación cada vez maior. É dicir, a ganancia branda do accionamiento ten que crecer. Calquera persoa que trate de aumentar o volume dalgún amplificador rueiro, sufriría a mesma situación que sufrira Black, xa que o absurdo da realimentación desestabilízase.

Aquí (nesta nova tecnoloxía) había o problema de estabilidade mencionado por Maxwell e Routh, pero como a dinámica era moi complexa (ecuacións de orde 50), o criterio de Routh non solucionou moito. Os enxeñeiros de comunicacións estaban afeitos utilizar tanto a resposta frecuencial como as matemáticas de variables complexas desenvolvidas por Cauchy, polo que as análises dos laboratorios Bell enfocáronse cara a un campo complexo. En 1932 Nyquist publica un artigo sobre a estabilidade.
A estabilidade analizábase mediante uns gráficos de resposta frecuencial do fleje. A partir desta teoría desenvolveuse un amplo método de deseño de amplificadores realimentados.
Xunto co amplificador realimentado, comezou a utilizar o control realimentado tamén en procesos industriais. Neste campo, en procesos complexos, sen linealidad e con grandes retardos entre o sensor e o actuador, o control, proporcional, integral e derivativo, ao que fan referencia Callender, Hartree e Porter (1936), comezou a utilizarse.
Esta tecnoloxía, baseada tanto en traballos experimentais como en aproximacións de linealización, desenvolveu métodos de “sintonización” paira seleccionar os valores adecuados dos parámetros do controlador PID. Nesta época, apareceron os dispositivos de condución e control de avións (de especial relevancia, o desenvolvemento de sensores paira medir a altura e a velocidade dos avións), presentando o informe de control nesta materia en 1973 Mc Ruer.
Durante a Segunda Guerra Mundial deuse un gran impulso ao control da realimentación. En Estados Unidos, tantos enxeñeiros como matemáticos do laboratorio do MIT combinaron os seus coñecementos paira desenvolver o amplificador realimentado de Bode, o control PID dos procesos e as teorías do control dos procesos estocásticos de Wiener (1930). O resultado foi o desenvolvemento de toda a técnica de deseño de mecanismos de control ou serbomecanismos. Moitos destes traballos foron publicados e recolleitos no Laboratorio de Radiación (James, Michols e Philips, 1947).
En 1948 W.R. desenvolveu una nova visión no deseño de sistemas de control. Evans. Isto traballaba con sistemas de condución e control de avións. Moitos dos problemas que aparecen presentan situacións dinámicas inestables ou case inestables e Evans pensou volver ao estudo da ecuación característica, é dicir, aos traballos de Maxwell e Routh.
Evans desenvolveu técnicas e regras paira seguir gráficamente a disposición xeométrica das raíces da ecuación característica cando se modifica un parámetro. O seu método, a disposición xeométrica das raíces, é moi adecuado paira a análise e deseño da estabilidade e segue sendo una técnica importante na actualidade.
Nos anos 50, Bellman e Kalman regresaron a Estados Unidos e Pontryagin Rusia a utilizar ecuacións diferenciais como modelos de sistemas de control. Moitos destes traballos apareceron a medida que se desenvolveu a área de control de satélites artificiais. Ademais, os cálculos que non podían realizarse 10 anos antes realizábanse con computadoras dixitais. A obra de Lyapuntov ampliou o estudo do control óptimo iniciado por Wiener e Phillips durante a guerra.
Estes traballos foron presentados na primeira conferencia da Federación Internacional de Control Automático celebrada en Moscova en 1960. Estas operacións de control non se basearon na resposta frecuencial ou na ecuación característica, senón nas ecuacións diferenciais, o que deu lugar a un amplo uso dos computadores. Estes métodos denomínanse control moderno.
Finalmente, estas novas técnicas, que apareceron a partir da década dos 70, inclúen control en sistemas non lineais, control de adaptación, control fuzzy ou control multivariante. Coa aparición da computadora ampliouse tanto a capacidade paira realizar cálculos complicados como a posibilidade de utilizar algoritmos complexos. O desenvolvemento de técnicas de control moderno supuxo, por tanto, un avance espectacular até chegar a ser cada vez máis utilizadas na actualidade.
Por iso, un enxeñeiro ben preparado debe aprender e dominar moitas técnicas paira atopar a resposta máis adecuada ante un problema. Ademais, en base a estas técnicas, deberá ser capaz de utilizar e analizar os cálculos realizados na computadora.
Zu idazle
Zientzia aldizkaria

