

Historial de controladores
En definitiva, la técnica de control necesaria para conducir el robot es conocida desde hace tiempo y se puede encontrar en numerosos procesos industriales.
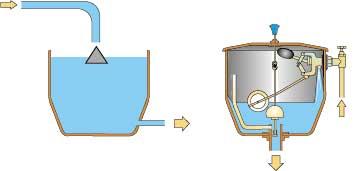
El estudio de los controladores que han aparecido a lo largo de los años permite encontrar elementos procedentes de la antigüedad. Así, XVII. Hasta el siglo XX, los sistemas para controlar el nivel de líquido de una lámpara de aceite o mantener el nivel de un recipiente de vino (aunque llene muchos vasos) son sistemas de control. En este tipo de sistemas se controla el nivel del fluido de control del flujo, ya que el flujo a través de un agujero es proporcional a la presión. La herramienta que se inventó antiguamente para controlar el nivel de fluido es un flotador que todavía se utiliza en los depósitos de los baños. A medida que disminuye el nivel de fluido, el flujo de alimentación aumenta y cuando aumenta el nivel, el flujo de alimentación disminuye, eliminándolo en el caso necesario. La figura 1 muestra la presentación de esta herramienta y el esquema de un depósito en los baños actuales. En este sistema, el sensor y el accionamiento están combinados en un único dispositivo (flotador y tubo de alimentación).
XVII. y XIX. Uno de los trabajos aparecidos durante siglos es el control de temperatura en el horno diseñado por Drebbell (1620) y para calentar la incubadora de pollos. En la figura 2 se presenta el diseño de este control. El horno está formado por una caja con fuego interno y un tubo con regulador de tiro. En el interior de la cámara de combustión se puede encontrar una incubadora de pollos con doble pared que llena de agua la separación entre estos muros. El sensor de temperatura es un recipiente de vidrio lleno de alcohol y mercurio situado en el tramo mencionado.
A medida que el fuego calienta la caja y el agua, el alcohol se dilata y el tallo que lleva el flotador asciende haciendo descender el regulador de tiro hacia el tubo. Cuando la caja está demasiado fría, el alcohol disminuye y se abre el regulador y aumenta la fuerza del fuego. La temperatura deseada viene dada por la longitud del tallo que lleva el flotador.
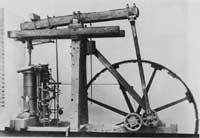
En esta misma época, el control de la velocidad de rotación de los ejes era un problema urgente de control automático. Por ejemplo, el control de la velocidad de la piedra de un molino de viento que molienda el trigo es un control automático. Entre los diferentes métodos empleados, el mejor fue el péndulo cónico o basado en el regulador de bolas. Este dispositivo se utilizaba para medir la velocidad del molino. Pero la aplicación que hizo famoso este tipo de reguladores fue la máquina de vapor (Watt, 1788). En la figura 3 se muestra la fotografía y esquema de esta máquina y en la figura 4 se muestra el primer plano del regulador de la bola móvil.
La acción del regulador centrífugo es fácilmente comprensible. Supongamos que la máquina está trabajando en su estado de equilibrio y de repente se le aplica la carga. En ese momento se reduce la velocidad de la máquina y se reduce el cono formado por las bolas del regulador. Así, el ángulo que forman las bolas con la vertical se utiliza como sensor de salida. Esta acción consiste en abrir la válvula principal de vapor (accionamiento) y hacer pasar más vapor hacia la máquina para recuperar la velocidad perdida. Para mantener la válvula de vapor en este estado, las bolas del regulador deberán formar un ángulo diferente, por lo que la velocidad obtenida tras la aplicación de la carga no será exactamente igual a la anterior.
Watt fue un ingeniero práctico, que trabajó con los molinos de viento antes, y no realizó un análisis teórico del regulador. XIX. A finales del siglo XX, los estudios del mencionado sistema de control pasaron de ser una mera práctica a ser el núcleo de los análisis teóricos. C.V. Airy fue profesor de matemáticas y astronomía en la Universidad de Cambridge entre 1826 y 35 y astrónomo de Greenwich entre 1835 y 81. Airy, tras numerosos estudios sobre la velocidad, descubrió que el regulador del péndulo podía tener un movimiento inestable. Airy es el primer análisis de la inestabilidad de un sistema de control. El análisis, basado en ecuaciones diferenciales, fue el inicio del análisis del control de realimentación.
El primer trabajo sistemático de estabilidad en el control de realimentación fue “On Governos” de Maxwell (1868). En este trabajo, Maxwell desarrolló las ecuaciones diferenciales del regulador, linealizándolas alrededor del punto de equilibrio. De esta manera, demostró que la estabilidad está asociada a las raíces de una ecuación, es decir, que dichas raíces debían tener partes reales negativas.
El problema del criterio de estabilidad, E.J., ganador del Adams de 1877. Se puede ver que fue solucionado por Routh. El criterio desarrollado en el ensayo que sirvió para ganar el premio es la técnica que siguen aprendiendo los ingenieros de control. El análisis de la ecuación característica siguió siendo la base de la teoría del control en Bell Telephone y H.S. Por las invenciones de Black, hasta la aparición del amplificador electrónico realimentado en 1927.
A tras la aparición del trabajo de Routh. M. El matemático ruso Lyapuntov comenzó a estudiar el problema de la estabilidad del movimiento y en 1892 empleó las ecuaciones no lineales del movimiento obteniendo un resultado equivalente al criterio de Routh. Su obra fue muy importante, pero no apareció escrita hasta 1958.
XX. Si nos adentramos en el siglo XIX, la Primera Guerra Mundial, al igual que su importancia en la mejora de todas las técnicas, tuvo una gran influencia el uso de sistemas de control, como ejemplo el desarrollo de amplificadores realimentados en 1945 H. W. Se describe en un artículo escrito por Bode. Los amplificadores electrónicos permitieron realizar llamadas de larga distancia en las primeras décadas de la Primera Guerra Mundial.
Sin embargo, a medida que aumenta la distancia, la pérdida de energía eléctrica también aumenta a pesar del gran diámetro del hilo de hierro, y cada vez son más los amplificadores necesarios para evitar pérdidas. En consecuencia, tantos amplificadores distorsionaron debido a la falta de linealidad de los tubos de vacío utilizados. La solución a este problema la encontró Black en la realimentación: para evitar la distorsión es necesaria una realimentación cada vez mayor. Es decir, la ganancia blanda del accionamiento tiene que crecer. Cualquier persona que haya tratado de aumentar el volumen de algún amplificador callejero, sufriría la misma situación que había sufrido Black, ya que el absurdo de la realimentación se desestabiliza.

Aquí (en esta nueva tecnología) había el problema de estabilidad mencionado por Maxwell y Routh, pero como la dinámica era muy compleja (ecuaciones de orden 50), el criterio de Routh no solucionó mucho. Los ingenieros de comunicaciones estaban acostumbrados a utilizar tanto la respuesta frecuencial como las matemáticas de variables complejas desarrolladas por Cauchy, por lo que los análisis de los laboratorios Bell se enfocaron hacia un campo complejo. En 1932 Nyquist publica un artículo sobre la estabilidad.
La estabilidad se analizaba mediante unos gráficos de respuesta frecuencial del fleje. A partir de esta teoría se desarrolló un amplio método de diseño de amplificadores realimentados.
Junto con el amplificador realimentado, comenzó a utilizar el control realimentado también en procesos industriales. En este campo, en procesos complejos, sin linealidad y con grandes retardos entre el sensor y el actuador, el control, proporcional, integral y derivativo, al que hacen referencia Callender, Hartree y Porter (1936), comenzó a utilizarse.
Esta tecnología, basada tanto en trabajos experimentales como en aproximaciones de linealización, desarrolló métodos de “sintonización” para seleccionar los valores adecuados de los parámetros del controlador PID. En esta época, aparecieron los dispositivos de conducción y control de aviones (de especial relevancia, el desarrollo de sensores para medir la altura y la velocidad de los aviones), presentando el informe de control en esta materia en 1973 Mc Ruer.
Durante la Segunda Guerra Mundial se dio un gran impulso al control de la realimentación. En Estados Unidos, tanto ingenieros como matemáticos del laboratorio del MIT combinaron sus conocimientos para desarrollar el amplificador realimentado de Bode, el control PID de los procesos y las teorías del control de los procesos estocásticos de Wiener (1930). El resultado fue el desarrollo de toda la técnica de diseño de mecanismos de control o serbomecanismos. Muchos de estos trabajos fueron publicados y recogidos en el Laboratorio de Radiación (James, Michols y Philips, 1947).
En 1948 W.R. desarrolló una nueva visión en el diseño de sistemas de control. Evans. Esto trabajaba con sistemas de conducción y control de aviones. Muchos de los problemas que aparecen presentan situaciones dinámicas inestables o casi inestables y Evans pensó volver al estudio de la ecuación característica, es decir, a los trabajos de Maxwell y Routh.
Evans desarrolló técnicas y reglas para seguir gráficamente la disposición geométrica de las raíces de la ecuación característica cuando se modifica un parámetro. Su método, la disposición geométrica de las raíces, es muy adecuado para el análisis y diseño de la estabilidad y sigue siendo una técnica importante en la actualidad.
En los años 50, Bellman y Kalman regresaron a Estados Unidos y Pontryagin Rusia a utilizar ecuaciones diferenciales como modelos de sistemas de control. Muchos de estos trabajos aparecieron a medida que se desarrolló el área de control de satélites artificiales. Además, los cálculos que no podían realizarse 10 años antes se realizaban con computadoras digitales. La obra de Lyapuntov amplió el estudio del control óptimo iniciado por Wiener y Phillips durante la guerra.
Estos trabajos fueron presentados en la primera conferencia de la Federación Internacional de Control Automático celebrada en Moscú en 1960. Estas operaciones de control no se basaron en la respuesta frecuencial o en la ecuación característica, sino en las ecuaciones diferenciales, lo que dio lugar a un amplio uso de los computadores. Estos métodos se denominan control moderno.
Finalmente, estas nuevas técnicas, que aparecieron a partir de la década de los 70, incluyen control en sistemas no lineales, control de adaptación, control fuzzy o control multivariante. Con la aparición de la computadora se amplió tanto la capacidad para realizar cálculos complicados como la posibilidad de utilizar algoritmos complejos. El desarrollo de técnicas de control moderno supuso, por tanto, un avance espectacular hasta llegar a ser cada vez más utilizadas en la actualidad.
Por eso, un ingeniero bien preparado debe aprender y dominar muchas técnicas para encontrar la respuesta más adecuada ante un problema. Además, en base a estas técnicas, deberá ser capaz de utilizar y analizar los cálculos realizados en la computadora.
Zu idazle
Zientzia aldizkaria

