

Historial de controladors
En definitiva, la tècnica de control necessària per a conduir el robot és coneguda des de fa temps i es pot trobar en nombrosos processos industrials.
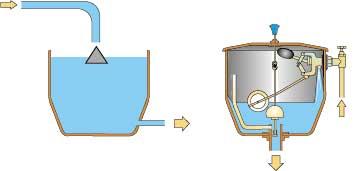
L'estudi dels controladors que han aparegut al llarg dels anys permet trobar elements procedents de l'antiguitat. Així, XVII. Fins al segle XX, els sistemes per a controlar el nivell de líquid d'un llum d'oli o mantenir el nivell d'un recipient de vi (encara que ompli molts gots) són sistemes de control. En aquesta mena de sistemes es controla el nivell del fluid de control del flux, ja que el flux a través d'un forat és proporcional a la pressió. L'eina que es va inventar antigament per a controlar el nivell de fluid és un flotador que encara s'utilitza en els dipòsits dels banys. A mesura que disminueix el nivell de fluid, el flux d'alimentació augmenta i quan augmenta el nivell, el flux d'alimentació disminueix, eliminant-lo en el cas necessari. La figura 1 mostra la presentació d'aquesta eina i l'esquema d'un dipòsit en els banys actuals. En aquest sistema, el sensor i l'accionament estan combinats en un únic dispositiu (flotador i tub d'alimentació).
XVII. i XIX. Un dels treballs apareguts durant segles és el control de temperatura en el forn dissenyat per Drebbell (1620) i per a escalfar la incubadora de pollastres. En la figura 2 es presenta el disseny d'aquest control. El forn està format per una caixa amb foc intern i un tub amb regulador de tir. A l'interior de la cambra de combustió es pot trobar una incubadora de pollastres amb doble paret que plena d'aigua la separació entre aquests murs. El sensor de temperatura és un recipient de vidre ple d'alcohol i mercuri situat en el tram esmentat.
A mesura que el foc escalfa la caixa i l'aigua, l'alcohol es dilata i la tija que porta el flotador ascendeix fent descendir el regulador de tir cap al tub. Quan la caixa està massa freda, l'alcohol disminueix i s'obre el regulador i augmenta la força del foc. La temperatura desitjada ve donada per la longitud de la tija que porta el flotador.
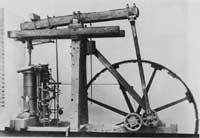
En aquesta mateixa època, el control de la velocitat de rotació dels eixos era un problema urgent de control automàtic. Per exemple, el control de la velocitat de la pedra d'un molí de vent que mòltaa el blat és un control automàtic. Entre els diferents mètodes emprats, el millor va ser el pèndol cònic o basat en el regulador de boles. Aquest dispositiu s'utilitzava per a mesurar la velocitat del molí. Però l'aplicació que va fer famós aquest tipus de reguladors va ser la màquina de vapor (Watt, 1788). En la figura 3 es mostra la fotografia i esquema d'aquesta màquina i en la figura 4 es mostra el primer pla del regulador de la bola mòbil.
L'acció del regulador centrífug és fàcilment comprensible. Suposem que la màquina està treballant en el seu estat d'equilibri i de sobte se li aplica la càrrega. En aquest moment es redueix la velocitat de la màquina i es redueix el con format per les boles del regulador. Així, l'angle que formen les boles amb la vertical s'utilitza com a sensor de sortida. Aquesta acció consisteix a obrir la vàlvula principal de vapor (accionament) i fer passar més vapor cap a la màquina per a recuperar la velocitat perduda. Per a mantenir la vàlvula de vapor en aquest estat, les boles del regulador hauran de formar un angle diferent, per la qual cosa la velocitat obtinguda després de l'aplicació de la càrrega no serà exactament igual a l'anterior.
Watt va ser un enginyer pràctic, que va treballar amb els molins de vent abans, i no va realitzar una anàlisi teòrica del regulador. XIX. A la fi del segle XX, els estudis de l'esmentat sistema de control van passar de ser una mera pràctica a ser el nucli de les anàlisis teòriques. C.V. Airy va ser professor de matemàtiques i astronomia en la Universitat de Cambridge entre 1826 i 35 i astrònom de Greenwich entre 1835 i 81. Airy, després de nombrosos estudis sobre la velocitat, va descobrir que el regulador del pèndol podia tenir un moviment inestable. Airy és la primera anàlisi de la inestabilitat d'un sistema de control. L'anàlisi, basat en equacions diferencials, va ser l'inici de l'anàlisi del control de realimentación.
El primer treball sistemàtic d'estabilitat en el control de realimentación va ser “On Governos” de Maxwell (1868). En aquest treball, Maxwell va desenvolupar les equacions diferencials del regulador, linealizándolas al voltant del punt d'equilibri. D'aquesta manera, va demostrar que l'estabilitat està associada a les arrels d'una equació, és a dir, que aquestes arrels havien de tenir parts reals negatives.
El problema del criteri d'estabilitat, E.J., guanyador de l'Adams de 1877. Es pot veure que va ser solucionat per Routh. El criteri desenvolupat en l'assaig que va servir per a guanyar el premi és la tècnica que continuen aprenent els enginyers de control. L'anàlisi de l'equació característica va continuar sent la base de la teoria del control en Bell Telephone i H.S. Per les invencions de Black, fins a l'aparició de l'amplificador electrònic realimentado en 1927.
A després de l'aparició del treball de Routh. M. El matemàtic rus Lyapuntov va començar a estudiar el problema de l'estabilitat del moviment i en 1892 va emprar les equacions no lineals del moviment obtenint un resultat equivalent al criteri de Routh. La seva obra va ser molt important, però no va aparèixer escrita fins a 1958.
XX. Si ens endinsem en el segle XIX, la Primera Guerra Mundial, igual que la seva importància en la millora de totes les tècniques, va tenir una gran influència l'ús de sistemes de control, com a exemple el desenvolupament d'amplificadors realimentados en 1945 H. W. Es descriu en un article escrit per Bode. Els amplificadors electrònics van permetre realitzar crides de llarga distància en les primeres dècades de la Primera Guerra Mundial.
No obstant això, a mesura que augmenta la distància, la pèrdua d'energia elèctrica també augmenta malgrat el gran diàmetre del fil de ferro, i cada vegada són més els amplificadors necessaris per a evitar pèrdues. En conseqüència, tants amplificadors van distorsionar a causa de la falta de linealitat dels tubs de buit utilitzats. La solució a aquest problema la va trobar Black en la realimentación: per a evitar la distorsió és necessària una realimentación cada vegada major. És a dir, el guany tou de l'accionament ha de créixer. Qualsevol persona que hagi tractat d'augmentar el volum d'algun amplificador de carrer, sofriria la mateixa situació que havia sofert Black, ja que l'absurd de la realimentación es desestabilitza.

Aquí (en aquesta nova tecnologia) hi havia el problema d'estabilitat esmentat per Maxwell i Routh, però com la dinàmica era molt complexa (equacions d'ordre 50), el criteri de Routh no va solucionar molt. Els enginyers de comunicacions estaven acostumats a utilitzar tant la resposta freqüencial com les matemàtiques de variables complexes desenvolupades per Cauchy, per la qual cosa les anàlisis dels laboratoris Bell es van enfocar cap a un camp complex. En 1932 Nyquist publica un article sobre l'estabilitat.
L'estabilitat s'analitzava mitjançant uns gràfics de resposta freqüencial del fleix. A partir d'aquesta teoria es va desenvolupar un ampli mètode de disseny d'amplificadors realimentados.
Juntament amb l'amplificador realimentado, va començar a utilitzar el control realimentado també en processos industrials. En aquest camp, en processos complexos, sense linealitat i amb grans retards entre el sensor i l'actuador, el control, proporcional, integral i derivatiu, al qual fan referència Callender, Hartree i Porter (1936), va començar a utilitzar-se.
Aquesta tecnologia, basada tant en treballs experimentals com en aproximacions de linealización, va desenvolupar mètodes de “sintonització” per a seleccionar els valors adequats dels paràmetres del controlador PID. En aquesta època, van aparèixer els dispositius de conducció i control d'avions (d'especial rellevància, el desenvolupament de sensors per a mesurar l'altura i la velocitat dels avions), presentant l'informe de control en aquesta matèria en 1973 Mc Ruer.
Durant la Segona Guerra Mundial es va donar un gran impuls al control de la realimentación. Als Estats Units, tant enginyers com matemàtics del laboratori del MIT van combinar els seus coneixements per a desenvolupar l'amplificador realimentado de Bode, el control PID dels processos i les teories del control dels processos estocàstics de Wiener (1930). El resultat va ser el desenvolupament de tota la tècnica de disseny de mecanismes de control o serbomecanismos. Molts d'aquests treballs van ser publicats i recollits en el Laboratori de Radiació (James, Michols i Philips, 1947).
En 1948 W.R. va desenvolupar una nova visió en el disseny de sistemes de control. Evans. Això treballava amb sistemes de conducció i control d'avions. Molts dels problemes que apareixen presenten situacions dinàmiques inestables o gairebé inestables i Evans va pensar tornar a l'estudi de l'equació característica, és a dir, als treballs de Maxwell i Routh.
Evans va desenvolupar tècniques i regles per a seguir gràficament la disposició geomètrica de les arrels de l'equació característica quan es modifica un paràmetre. El seu mètode, la disposició geomètrica de les arrels, és molt adequat per a l'anàlisi i disseny de l'estabilitat i continua sent una tècnica important en l'actualitat.
En els anys 50, Bellman i Kalman van tornar als Estats Units i Pontryagin Rússia a utilitzar equacions diferencials com a models de sistemes de control. Molts d'aquests treballs van aparèixer a mesura que es va desenvolupar l'àrea de control de satèl·lits artificials. A més, els càlculs que no podien realitzar-se 10 anys abans es realitzaven amb computadores digitals. L'obra de Lyapuntov va ampliar l'estudi del control òptim iniciat per Wiener i Phillips durant la guerra.
Aquests treballs van ser presentats en la primera conferència de la Federació Internacional de Control Automàtic celebrada a Moscou en 1960. Aquestes operacions de control no es van basar en la resposta freqüencial o en l'equació característica, sinó en les equacions diferencials, la qual cosa va donar lloc a un ampli ús dels computadors. Aquests mètodes es denominen control modern.
Finalment, aquestes noves tècniques, que van aparèixer a partir de la dècada dels 70, inclouen control en sistemes no lineals, control d'adaptació, control fuzzy o control multivariante. Amb l'aparició de la computadora es va ampliar tant la capacitat per a realitzar càlculs complicats com la possibilitat d'utilitzar algorismes complexos. El desenvolupament de tècniques de control modern va suposar, per tant, un avanç espectacular fins a arribar a ser cada vegada més utilitzades en l'actualitat.
Per això, un enginyer ben preparat ha d'aprendre i dominar moltes tècniques per a trobar la resposta més adequada davant un problema. A més, sobre la base d'aquestes tècniques, haurà de ser capaç d'utilitzar i analitzar els càlculs realitzats en la computadora.
Zu idazle
Zientzia aldizkaria

