

Per a veure-ho primer cal separar les vores
Si un robot vol separar els objectes d'una imatge, primer ha de detectar les vores dels objectes. D'aquí l'ús de detectors d'arestes en la visió artificial. Edurne Barrenetxea, de la Universitat Pública de Navarra, ha dissenyat un nou detector de cantonades.
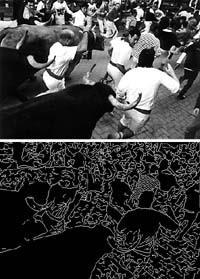
El funcionament del detector d'arestes és senzill. S'agafa una imatge, es passa a l'escala de grises i es fica en el detector. Una vegada analitzada la imatge, el detector retorna una imatge amb el fons fosc i les vores marcades en blanc.
Normalment, els detectors d'arestes es basen en la identificació de punts en els quals hi ha grans canvis en l'escala dels grisos. En la tècnica utilitzada per Edurne Barrenetxea, no obstant això, l'aresta és un conjunt de píxels amb un canvi superior a l'estimat amb els urinaris adjacents.
Aquest sistema pot ser d'utilitat tant per a la indústria com per a la medicina. Per exemple, es pot adaptar el detector perquè un robot detecti les portes d'un edifici. En medicina pot servir per a detectar melanomes. A partir d'una imatge d'una taca, es pot dibuixar la seva vora i analitzar la seva evolució en diversos mesos. Si en aquest interval de temps l'aresta de la mel s'ha mogut 3 mil·límetres, pot ser que hi hagi un melanoma. Aquesta evolució és molt difícil per al metge, però no per als sistemes informàtics.
Zu idazle
Zientzia aldizkaria

