

Sistemas de posicionamiento por satélite diversos
Fraunhofer IIS-ko Satelite Hargailuen departamentuko ikertzailea (Nurenberg, Alemania)
Para poder viajar de forma eficaz desde el punto A hasta el punto B, es necesario conocer su ubicación exacta. Desde hace dos mil años, la humanidad ha buscado ese objetivo. XVI. y XVII. comercio y colonización de los siglos XX. Las frías y calurosas guerras del siglo XX nos han llevado a conocer estos puntos con una precisión de milímetros. Para ello han sido necesarios los avances en matemáticas, astronomía y relojería.
Para una correcta navegación, primero es necesario establecer un sistema de referencia o de coordenadas. Los antiguos griegos sabían que la Tierra era esférica y, al parecer, tenían una idea cercana de su tamaño. Con pocos cambios, su sistema de referencia ha llegado a la actualidad: el sistema de latitud y longitud.
La definición y medida de la latitud fue sencilla, ya que existía una referencia natural, el ecuador, y ambos polos distaban 90º respecto al ecuador. Todo esto era fácil de medir gracias a la estrella polar. Sin embargo, la medida de longitud resultó más complicada, ya que no existía ninguna referencia natural para la medición. El XVII fue la creación de sistemas de medición de longitud. y XVIII. Trabajo de varios científicos y artesanos de siglos. La precisión en la longitud estaba íntimamente relacionada con la medición del tiempo, ya que la Tierra en 24 horas da una vuelta de 360°, es decir, 15° por hora. Así, si se puede conocer la diferencia entre las horas locales de dos lugares, se puede conocer también la diferencia de longitud entre ellas.
El carpintero británico John Harrison (1693-1776), en 1761, ganó el premio de 20.000 libras, en una época de fortuna, por crear el reloj más preciso que se inventó hasta entonces. El reloj pesaba 27 kg y provocaba un error diario de un solo segundo. Por ejemplo, habría que pasar mil años para que el cristal de cuarzo que llevan los relojes actuales ocasionase un error de un segundo. El cronógrafo de Harrison permitió por primera vez en la historia medir la longitud con una precisión aceptable.
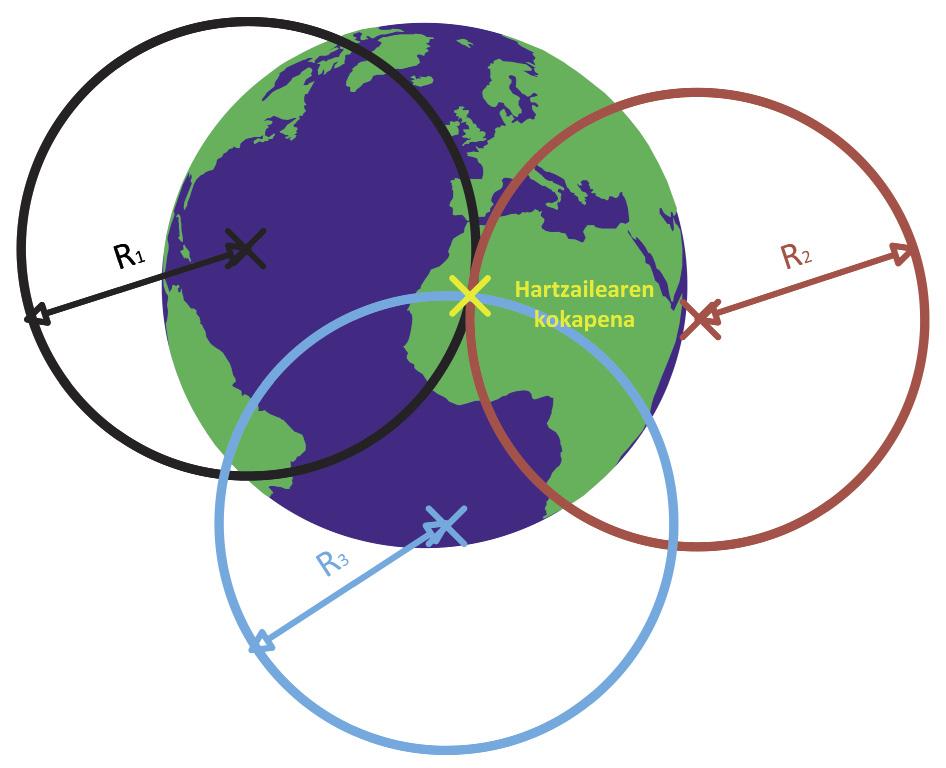
XX. En el siglo XX, el descubrimiento de los dispositivos de radio y las ondas de radio revolucionó el mundo de la navegación. Pronto se dieron cuenta de que las ondas de radio se propagaban a una velocidad determinada. Desgraciadamente, una vez más, el problema principal fue el de medir el tiempo. De hecho, la velocidad de propagación de las ondas de radio hacía que se necesitasen relojes cada vez más precisos para realizar mediciones con precisión notable. Básicamente, si se conoce exactamente la ubicación de la estación de transmisión k (x k ,y k ,z) y el momento de transmisión, sería fácil calcular la distancia entre ésta y el receptor (d k). Por tanto, el procedimiento denominado trilateración permite calcular la posición del receptor (x,y,z) cuando se conocen al menos 3 puntos y momentos de transmisión.
? ,(x{x1)2+(y{y1)2+(z{z1)2 = d1
> ,(x{x2)2+(y{y2)2+(z{z2)2 = d2
? ,(x{x3)2+(y{y3)2+(z{z3)2 = d3
Por supuesto, para ello es clave medir con precisión el tiempo. Además, el receptor debe recibir ondas de radio, para lo que es necesario que los puntos de transmisión sean accesibles en todo momento o, mejor dicho, visibles. En 1957, justo en el momento en que la Unión Soviética puso en órbita el satélite Sputnik 1, científicos de todo el mundo se dieron cuenta de que no había lugar más apropiado que la órbita alrededor de la Tierra en todo momento y en todo lugar para establecer los transmisores disponibles. Tras la competencia espacial de los años 60, los estadounidenses comenzaron a desarrollar el conocido sistema GPS, pero hasta 1995 no fue operativo y pasaron 7 años más, hasta que el gobierno de Clinton hizo pública la señal de precisión militar. Poco después, los rusos empezaron a competir, pero no consiguieron que el sistema GLONASS estuviera 100% disponible hasta 2011.
A pesar de que Estados Unidos y la Unión Soviética son pioneros en los sistemas de posicionamiento por satélite, en la actualidad varias agencias espaciales y gobiernos están dando pasos para construir su propio sistema. Entre otros, en el año 2000, ESA (Agencia Espacial Europea) comenzó a desarrollar el sistema Galileo. A pesar de que inicialmente debía ser operativo para el año 2008 y ofrecer una precisión mundial de 4 m (10 veces superior al GPS), las tensiones políticas de los Estados miembros del proyecto y la presión del Gobierno de Estados Unidos todavía se encuentra en fase de desarrollo. Según las últimas previsiones de la ESA, se espera que esté disponible para el año 2020.
China también ha dado pasos con el sistema llamado BeiDou. Este sistema, que comenzó a desarrollarse en 2006, es ya de gran utilidad en la zona de Asia-Pacífico. Japón e India también cuentan con sus propios sistemas, QZSS (Sistema de Navegación Ia Zenit) e IRNSS (Sistema de Navegación por Satélite de la Región India), respectivamente, aunque en lugar de ser sistemas autónomos, sólo funcionan como «auxiliares» de otros sistemas. Por ejemplo, el QZSS japonés ofrece una señal más fuerte en determinados entornos. Todos los satélites de la constelación se encuentran en todo momento en un gran ángulo de elevación, por encima del receptor, de ahí su nombre. De esta forma se consigue evitar las vías de propagación obstaculizadas por los edificios, llegando claramente la señal GPS a los cañones urbanos tan habituales en Japón.
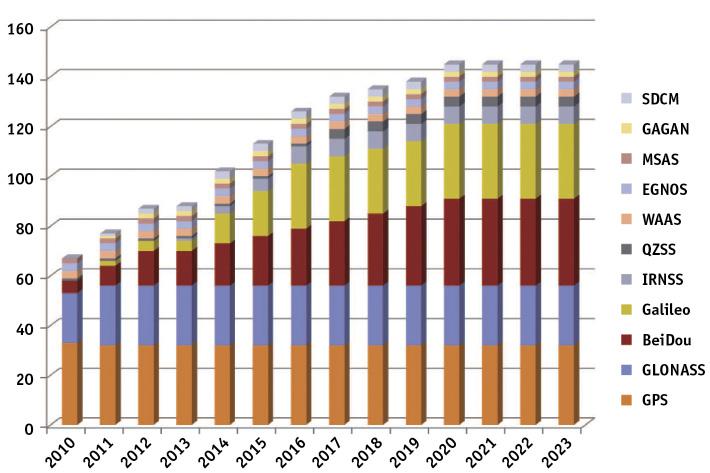
Si se cumplen las previsiones de las agencias espaciales, en pocos años se mejorarán los sistemas convencionales y se pondrán en marcha nuevos sistemas. De este modo, el número de satélites de los sistemas de navegación experimentará un notable aumento.
A pesar de que los sistemas de satélite disponibles en la actualidad son tan numerosos y diferentes, todos tienen un funcionamiento similar, el de la trilateración anteriormente mencionada. Normalmente, los satélites tienen una órbita Kepler para calcular su posición y emiten un mensaje con el parámetro del tiempo. Este mensaje se modula con una señal cíclica PRN (ruido pseudoaleatorio) de cierta longitud y frecuencia. Aunque la señal PRN tiene un espectro similar al ruido blanco en el dominio de frecuencia, sigue una secuencia preestablecida. De esta forma, mediante correlación se puede calcular en qué momento se recibe la señal en el código PRN. El satélite también emite parámetros que relacionan el momento del código PRN con el momento del tiempo. Por tanto, conociendo el tiempo de emisión y los tiempos de recepción, se conoce de inmediato la distancia recorrida por la señal d viajada = (captura - t emisión ) x c, donde c es la velocidad de la luz.
Sin embargo, este método tiene dos problemas principales: primero, aunque todos los relojes de los satélites de un determinado sistema estén sincronizados exactamente, el reloj del satélite y el reloj del receptor no están sincronizados. Además, la precisión de los relojes atómicos de rubidio de los satélites no es comparable al reloj de cuarzo que tienen nuestros móviles. La solución a este problema es sencilla. Al procedimiento de la trilateración se añade una nueva variable que muestra la diferencia temporal entre receptor y emisor (dt). Por lo tanto, en este caso hay que utilizar al menos cuatro satélites:
| ,(x{x1)2+(y{y1)2+(z{z1)2 +?t= d1
| ,(x{x2)2+(y{y2)2+(z{z2)2 +?t= d2
| ,(x{x3)2+(y{y3)2+(z{z3)2 +?t= d3
| ,(x{x4)2+(y{y4)2+(z{z4)2 +?t= d4
El segundo problema es más complejo. De hecho, hasta ahora la difusión de la señal se ha considerado uniforme y constante. En la realidad, sin embargo, son varios los fenómenos que pueden alterar la propagación de la señal. Por ejemplo, la capa atmosférica, llamada ionosfera, que se encuentra entre los 100 y 600 km de la superficie terrestre, está formada por partículas ionizadas por radiación solar. Esta carga eléctrica modifica la velocidad y el medio de propagación de las ondas de radio. Por otro lado, en la parte más cercana a la superficie terrestre, la troposfera, acumula el 80% de la masa atmosférica terrestre. Se trata principalmente de vapor de agua, que también modifica el índice de refracción del aire y, por tanto, la vía de propagación de las ondas. Por último, en la propia superficie, la reflexión, la ampliación multicanal (multi-path propagation) y los obstáculos viarios también desvian la señal. La dificultad para modelar detalladamente estos efectos es la principal fuente de error en la precisión del sistema de navegación por satélite.

Estos errores pueden ser corregidos en gran medida mediante el sistema DGPS (Sistema Diferencial de Posicionamiento Mundial). Estos sistemas se basan en estaciones de medida en tierra. Las estaciones de medida calculan su posición utilizando satélites del sistema GPS o satélites propios y, al conocer con precisión su ubicación, calculan la diferencia entre la ubicación calculada y la real. A continuación se puede contar el error de los efectos atmosféricos y transmitirlo por radio a quien pueda interesar. Este sistema permite mejorar la precisión de posición de 10 a 0,2 m. Por supuesto, los principales usuarios del DGPS provienen del mundo de la aviación, la cartografía y el ámbito militar. Cada país o entidad utiliza su propio sistema DGPS, por ejemplo: WAAS estadounidense, EGNOS europeo, GAGAN indio, MSAS japonés y SDCM ruso.
Por tanto, es evidente que en el futuro se tenderá a utilizar todos los sistemas disponibles a través de receptores capaces de utilizar simultáneamente varios sistemas de satélite. Estos receptores ofrecen numerosas ventajas. Por ejemplo, se ofrece un servicio más fiable, ya que si algunos sistemas de satélite no pudiesen ser utilizados intencionadamente o involuntariamente, podrían ser alternativas. Obviamente, si aumentamos el número de satélites, la zona en la que el receptor sería eficiente sería también más amplia. Además, si el receptor, además de estar adaptado a múltiples sistemas, tuviera la capacidad de recibir una señal de varias frecuencias, sería más robusto respecto a las interferencias. Por otro lado, hay que decir que este tipo de receptores también presenta desventajas, ya que además de tener una mayor complejidad, no todos los sistemas de satélite han sido pensados para ser compatibles. Es decir, en ocasiones, la mejora o información que ofrecen los satélites de ambos sistemas debido a su similar ubicación puede ser redundante.
Los receptores multi-satélite no han podido desarrollarse hasta fechas recientes de forma práctica, ya que el GPS era el único sistema disponible. En los últimos años, sin embargo, la apertura de GLONASS y BeiDou ha contribuido a la aparición de este tipo de receptores. Por ejemplo, los últimos modelos móviles de Apple y Samsung ofrecen una ubicación mediante GPS + GLONASS, y el fabricante Xiaomi, que está en auge, ha incorporado a este binomio el sistema BeiDou en sus últimos modelos.
Conocer dónde estamos siempre ha sido la voluntad y la necesidad de las personas. Hemos pasado de una época de desconocimiento a un conocimiento rápido y preciso de nuestra posición en cualquier lugar y en cualquier momento. En las últimas décadas, además, las tecnologías de posicionamiento por satélite han experimentado un gran auge. Una vez más, se ha constatado que la colaboración de diversas naciones e instituciones permite avances notables en el ámbito científico, técnico y social.
Bibliografía
Zu idazle
Zientzia aldizkaria

