

Various satellite positioning systems
Fraunhofer IIS-ko Satelite Hargailuen departamentuko ikertzailea (Nurenberg, Alemania)
In order to travel effectively from point A to point B, it is necessary to know its exact location. For two thousand years, humanity has sought that goal. XVI. and XVII. trade and colonization of the 20th century. The cold and hot wars of the twentieth century have led us to know these points with an accuracy of millimeters. This has required advances in mathematics, astronomy and watchmaking.
For correct navigation, it is first necessary to set a reference or coordinate system. The ancient Greeks knew that the Earth was spherical and apparently had a close idea of its size. With few changes, its reference system has reached today: the latitude and longitude system.
The definition and measurement of latitude was simple, since there was a natural reference, the equator, and both poles were 90º from the equator. All this was easy to measure thanks to the polar star. However, the length measurement was more complicated, as there was no natural reference for the measurement. The XVII was the creation of length measurement systems. and XVIII. Work of several scientists and craftsmen of centuries. Accuracy in length was intimately related to time measurement, as the Earth in 24 hours turns 360°, i.e. 15° per hour. Thus, if you can know the difference between the local hours of two places, you can also know the length difference between them.
British carpenter John Harrison (1693-1776), in 1761, won the prize of 20,000 pounds, in a time of fortune, for creating the most accurate watch that was invented until then. The clock weighed 27 kg and caused a daily error of a single second. For example, it would take a thousand years for the quartz crystal worn by current clocks to cause a one-second error. The Harrison chronograph allowed for the first time in history to measure length with acceptable precision.
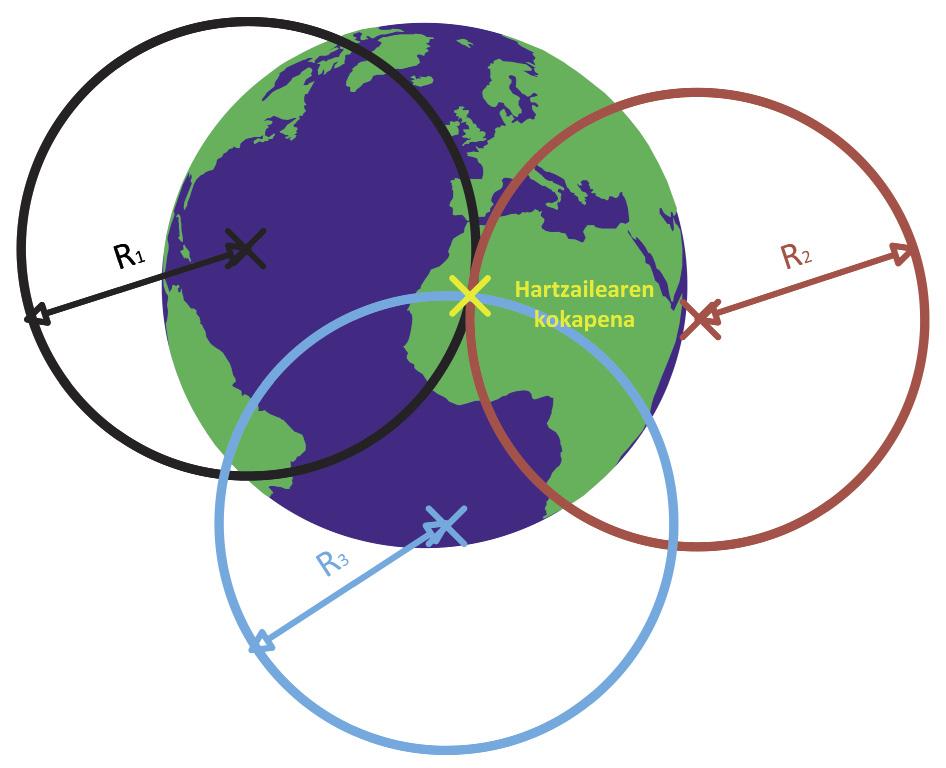
XX. In the 20th century, the discovery of radio devices and radio waves revolutionized the world of navigation. They soon realized that radio waves spread at a certain speed. Unfortunately, once again, the main problem was to measure time. In fact, the speed of propagation of radio waves meant that increasingly accurate clocks were needed to make measurements with remarkable accuracy. Basically, if you know exactly the location of the transmission station k (x k, y k, z) and the timing of transmission, it would be easy to calculate the distance between it and the receiver (d k). Therefore, the procedure called trilateration allows to calculate the position of the receiver (x,y,z) when at least 3 transmission points and moments are known.
,(x{x1)2+(y{y1)2+(z{z1)2 = d1
,(x{x2)2+(y{y2)2+(z{z2)2 = d2
,(x{x3)2+(y{y3)2+(z{z3)2 = d3
Of course, it is key to accurately measure time. In addition, the receiver must receive radio waves, so it is necessary that the transmission points are accessible at all times or, rather, visible. In 1957, just as the Soviet Union put the Sputnik 1 satellite into orbit, scientists around the world realized that there was no more appropriate place than the orbit around Earth at all times and everywhere to establish available transmitters. After the space competition of the 1960s, the Americans began to develop the well-known GPS system, but until 1995 it was not operational and 7 more years passed, until the Clinton administration made public the signal of military precision. Soon after, the Russians began to compete, but did not get the GLONASS system to be 100% available until 2011.
Although the United States and the Soviet Union are pioneers in satellite positioning systems, several space agencies and governments are currently taking steps to build their own system. Among others, in 2000, ESA (European Space Agency) began to develop the Galileo system. Although it initially had to be operational by 2008 and offer a global accuracy of 4 m (10 times higher than GPS), the political tensions of the project member states and the pressure of the United States government is still in development phase. According to the latest ESA forecasts, it is expected to be available by 2020.
China has also taken steps with the system called BeiDou. This system, which began to develop in 2006, is already very useful in the Asia-Pacific area. Japan and India also have their own systems, QZSS (Ia Zenit Navigation System) and IRNSS (Indian Region Satellite Navigation System), respectively, although instead of being autonomous systems, they only function as "auxiliary" to other systems. For example, Japanese QZSS offers a stronger signal in certain environments. All the constellation satellites are at all times at a great angle of elevation, above the receiver, hence their name. In this way it is possible to avoid the routes of propagation hindered by the buildings, clearly reaching the GPS signal to the urban canyons so common in Japan.
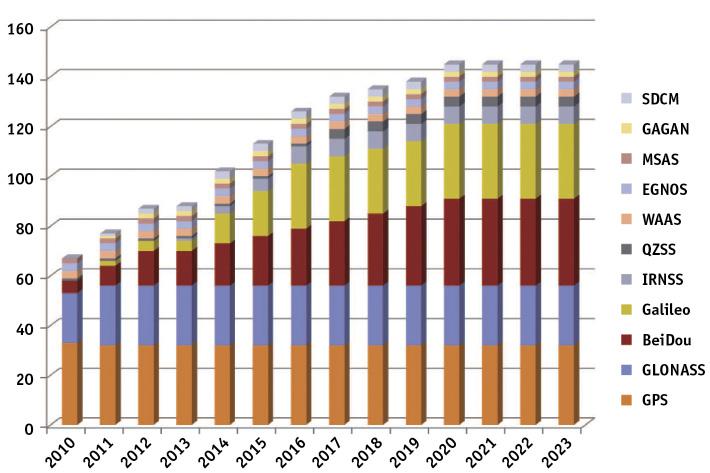
If space agency forecasts are met, conventional systems will be improved in a few years and new systems will be launched. In this way, the number of satellites in navigation systems will increase significantly.
Although the satellite systems available today are so numerous and different, all have a similar operation, that of the aforementioned trilateration. Normally, satellites have a Kepler orbit to calculate their position and emit a message with the time parameter. This message is modulated with a PRN cyclic signal (pseudorandom noise) of a certain length and frequency. Although the PRN signal has a spectrum similar to white noise in the frequency domain, it follows a preset sequence. In this way, by correlation you can calculate when the signal is received in the PRN code. The satellite also emits parameters that relate the time of the PRN code to the time of time. Therefore, knowing the emission time and reception times, it is immediately known the distance traveled by the signal d traveled = (capture - t emission) x c, where c is the speed of light.
However, this method has two main problems: first, although all satellite clocks in a given system are synchronised exactly, the satellite clock and the receiver clock are not synchronised. In addition, the accuracy of the rubidium atomic clocks of satellites is not comparable to the quartz clock that our mobiles have. The solution to this problem is simple. A new variable is added to the trilateration procedure, showing the temporal difference between receiver and transmitter (dt). Therefore, in this case you have to use at least four satellites:
,(x{x1)2+(y{y1)2+(z{z1)2 +?t= d1
,(x{x2)2+(y{y2)2+(z{z2)2 +?t= d2
,(x{x3)2+(y{y3)2+(z{z3)2 +?t= d3
,(x{x4)2+(y{y4)2+(z{z4)2 +?t= d4
The second problem is more complex. In fact, so far the spread of the signal has been considered uniform and constant. In reality, however, there are several phenomena that can alter the propagation of the signal. For example, the atmospheric layer, called the ionosphere, which is between 100 and 600 km of the earth's surface, is made up of particles ionized by solar radiation. This electric charge modifies the speed and means of propagation of radio waves. On the other hand, in the closest part to the Earth's surface, the troposphere accumulates 80% of the Earth's atmospheric mass. It is mainly water vapor, which also modifies the refractive index of air and, therefore, the pathway of propagation of waves. Finally, on the surface itself, reflection, multi-path propagation and road obstacles also dispose of the signal. The difficulty to model these effects in detail is the main source of error in the accuracy of the satellite navigation system.

These errors can be largely corrected by the DGPS system. These systems are based on ground measurement stations. The measurement stations calculate their position using GPS satellites or their own satellites and, knowing precisely their location, calculate the difference between the calculated and the actual location. Then you can count the error of the atmospheric effects and transmit it by radio to anyone who may be interested. This system improves position accuracy from 10 to 0.2 m. Of course, the main users of DGPS come from the world of aviation, cartography and the military. Each country or entity uses its own DGPS system, for example: American WAAS, European EGNOS, Indian GAGAN, Japanese MSAS and Russian SDCM.
It is therefore clear that in the future it will tend to use all available systems through receivers capable of simultaneously using several satellite systems. These receptors offer numerous advantages. For example, a more reliable service is offered, since if some satellite systems could not be used intentionally or involuntarily, they could be alternatives. Obviously, if we increase the number of satellites, the area where the receiver would be efficient would also be wider. In addition, if the receiver, in addition to being adapted to multiple systems, had the ability to receive a multi-frequency signal, it would be more robust compared to interference. On the other hand, it must be said that this type of receiver also presents disadvantages, since in addition to having a greater complexity, not all satellite systems have been designed to be compatible. That is, sometimes the improvement or information offered by the satellites of both systems due to their similar location can be redundant.
Multi-satellite receivers have not been able to develop until recent dates in a practical way, since GPS was the only system available. In recent years, however, the opening of GLONASS and BeiDou has contributed to the emergence of such receptors. For example, the latest mobile models from Apple and Samsung offer a location via GPS + GLONASS, and the booming Xiaomi manufacturer has incorporated the BeiDou system into this binomial in its latest models.
Knowing where we are has always been people's will and need. We have gone from a time of ignorance to a quick and accurate knowledge of our position anywhere and anytime. In recent decades, satellite positioning technologies have also experienced a great boom. Once again, it has been found that the collaboration of various nations and institutions allows notable advances in the scientific, technical and social fields.
Bibliography
Zu idazle
Zientzia aldizkaria

