

Robot Marisorgin

Pour que le robot ait un comportement intelligent, le système de contrôle doit avoir plusieurs caractéristiques. D'une part, vous devez réagir en temps réel. Il doit avoir des réflexes, en d'autres termes, une capacité de réaction rapide et adéquate face à des changements imprévus dans l'environnement. En outre, vous devez avoir une grande capacité de planification, à savoir la capacité de réflexion et de prise de décision sur différentes alternatives et d'apprendre des erreurs précédentes.
Combiner la capacité de penser à la réaction immédiate n'est rien de facile. Penser prend du temps, mais les réactions doivent être immédiates. En quelque sorte, nous devons trouver dans notre système de contrôle une combinaison adéquate entre la réaction et la planification. Le robot étant un système opérant dans le monde réel, son système de contrôle est associé à des processus qui génèrent et maintiennent une interaction robotique appropriée.
Tout robot mobile est conçu pour accomplir une tâche concrète. Il n'y a pas de robot universel pour tout. Dans le cas de Marisorgin, la tâche de navigation que nous avons choisi pour ce travail est la suivante: le robot devra quitter le laboratoire et aller à la bibliothèque (d'où recueillir quelques livres, par exemple). Une fois sur place, nous retournons et nous passerons par le bureau d'Otzeta (pour qu'Otzeta recueille les livres demandés). Finalement, vous devrez reprendre le chemin du laboratoire.
Robot Robot
Pour concevoir le robot qui va accomplir cette tâche, il faut d'abord garder à l'esprit que notre vision du monde et celle qu'un robot peut avoir sont totalement différents, puisque ses capteurs et agents sont totalement différents des nôtres.
Ces êtres perçoivent les objets et les événements de l'environnement à travers la vision, le toucher, l'odorat et l'oreille, et notre relation avec ces objets est conditionnée par notre capacité d'action (mûrir, bouger, tirer).
Mais la technologie actuelle est encore loin d'atteindre le degré de sophistication des capteurs que nous avons des êtres vivants. C'est pourquoi il est important de comprendre la vision globale du robot, c'est-à-dire les limitations que le robot a pour recevoir des informations sur son environnement ou pour mener à bien des actions. En fait, le degré d'intelligence d'un robot dépend aussi de la capacité de percevoir l'environnement et d'interagir entre eux.
Notre robot, Marisorgin, est un robot holonome B21 produit par la société RWI, avec de nombreux capteurs et actionneurs.
Navigation de base
Ces capteurs permettent au robot Marisorgin de disposer d'un système de réflexes de base. Grâce aux infrarouges, il est capable d'éviter les chocs avec des objets statiques et dynamiques et, à travers les sonars, il peut calculer et centrer la marche dans son espace libre gauche et droit. Ce système de réflexes est construit sur la base de comportements, des schémas d'action fondamentaux du robot. Les deux concernent, par exemple, des comportements « éviter les objets » et « corriger » respectivement.En outre, Marisorgin a deux autres comportements: ‘suivre l’objectif’ et ‘arrêter’. Le premier, avec une certaine orientation de la boussole, pousse le robot dans cette direction. De son côté, « arrêter » est activé si le robot heurte un objet et interrompt le fonctionnement de tout le système.

Chaque comportement a donc son objectif et décide des actions que le robot doit effectuer pour atteindre cet objectif, à savoir les instructions qu'il doit exécuter. Étant donné que ces commandes seront envoyées au système moteur, elles sont exprimées par la grandeur (combien) et le signe (avant ou arrière, gauche ou droite) des vitesses de rotation et de translation.
Système de localisation
Avec la navigation de base, le robot explore votre environnement en toute sécurité. Mais il est à la dérive, il est seulement capable de naviguer avec une certaine orientation. Pour que la marche de Marisorgin ait un objectif, il faut ajouter la capacité d'identifier certaines marques de l'environnement qui permettent d'identifier les sites. Mais il est important d'analyser la tâche du point de vue du robot. Nous rechercherons des marques ou des caractéristiques générales (qui peuvent être détectées par des capteurs) et significatives (qui vous aideront dans le parcours). Nous avons choisi les marques « pasillo-gela » et « fourchette ».
Le comportement ‘Salle des couloirs’ vise à faire connaître l’emplacement actuel du robot, pour ce qu’il utilise des sonars. Notez que l'environnement du robot est composé de pièces et de couloirs et, par sonars, calcule la distance des objets. Par conséquent, en détectant que les murs sont plus ou moins éloignés, le robot peut savoir où il est (dans le couloir ou dans une pièce).
La marque de jonction a été conçue avec des sorties d'urgence. Et c'est que tous les bâtiments publics doivent disposer de signaux de sortie d'urgence sur les croix, caractéristique qui nous sert à nos fins : si le robot identifie les signaux des croix, il serait facile pour nous d'indiquer la direction à suivre pour arriver à sa destination.
Pour identifier les signaux de sortie d'urgence, Marisorgin prend d'abord des images de l'environnement à travers la caméra. Ces images sont ensuite traitées par le réseau neuronal qui a été préparé pour identifier les signaux de sortie d'urgence.
Système Général de Navigation
En unissant la navigation de base et le système de localisation, nous obtenons un comportement de haut niveau qui combine tous les comportements décrits jusqu'à présent. L'objectif du système général de navigation, en plus d'éviter les collisions avec des objets, est de diriger le robot vers le point d'arrivée à travers les chambres et les couloirs, indiquant l'adresse à prendre à chaque carrefour.
Pour mesurer l'adéquation du système de navigation proposé, plusieurs expériences ont été réalisées avec Marisorgin au 3ème étage de la Faculté d'Informatique de San Sebastián. Et nous espérons que nous avons atteint l'objectif principal, car le robot est capable de naviguer avec les caractéristiques de son environnement.
Nous considérons que la contribution la plus importante du travail est l'effort que fait le robot pour s'approprier son environnement et profiter de ses caractéristiques. En fait, de nombreuses techniques de navigation sont basées sur la construction de la carte environnante et la livraison de la carte au robot.
Le problème de cette approche est que le robot n'est pas en mesure de répondre adéquatement aux changements imprévus qui se produisent dans son environnement (une chaise ou les gens compliquent son parcours). En tout cas, parce que le système exposé peut porter ses fruits vers l'avenir, nous aimerions généraliser le système de navigation et l'adapter à d'autres tâches et robots. Nous y sommes.
Robot mobile Marisorgin
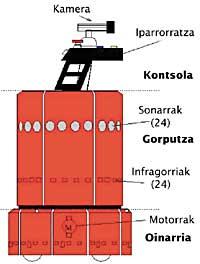
Capteurs de capteurs
Sonares: Ils calculent la distance aux objets de l'environnement. Les lectures de Sonar perdent de la fiabilité sur des distances supérieures à trois mètres et inférieures à un mètre. Infrarouge: Mesurez la proximité des objets en fonction de l'intensité lumineuse. Ils ne peuvent détecter que des objets à 50 cm ou moins. Capteurs d'impact : Comme leur nom l'indique, ils détectent les chocs.
Boussole: Indique l'orientation actuelle. Caméra: C'est certainement la plus complexe des capteurs, mais aussi celle que plus d'informations peuvent offrir.
Agents
Moteurs: réalisent les mouvements nécessaires pour la navigation: deux pour translation et un pour rotation.


Zu idazle
Zientzia aldizkaria

