

Robot Marisorgin

Perquè el robot tingui un comportament intel·ligent, el sistema de control ha de tenir diverses característiques. D'una banda, ha de reaccionar en temps real. Ha de tenir reflexos, en altres paraules, capacitat de reacció ràpida i adequada davant canvis imprevistos en l'entorn. A més, ha de comptar amb una alta capacitat de planificació, és a dir, capacitat de reflexió i presa de decisions sobre diferents alternatives i d'aprendre d'errors previs.
Combinar la capacitat de pensar amb la reacció immediata no és gens fàcil. Pensar requereix temps, però les reaccions han de ser immediates. D'alguna manera, hem de trobar en el nostre sistema de control una combinació adequada entre la reacció i la planificació. A l'ésser el robot un sistema que opera en el món real, el seu sistema de control està associat a processos que generin i mantinguin una interacció robòtica adequada.
Tot robot mòbil es dissenya per a fer una tasca concreta. No hi ha robot universal per a tot. En el cas de Marisorgin, la tasca de navegació que hem triat per a aquest treball és la següent: el robot haurà de sortir del laboratori i anar a la biblioteca (d'allí recollir alguns llibres, per exemple). Una vegada allí, donem la volta i la passarem per l'oficina d'Otzeta (perquè Otzeta reculli els llibres sol·licitats). Finalment, haurà de realitzar novament el camí al laboratori.
Robot
Per a dissenyar el robot que farà aquesta tasca, en primer lloc cal tenir en compte que la nostra visió del món i la que pot tenir un robot són totalment diferents, ja que els seus sensors i agents són totalment diferents als nostres.
Aquests éssers percebem els objectes i esdeveniments de l'entorn a través de la visió, el tacte, l'olfacte i l'oïda, i la nostra relació amb aquests objectes està condicionada per la nostra capacitat d'acció (madurar, moure, tirar).
Però la tecnologia actual està encara lluny d'aconseguir el grau de sofisticació dels sensors que tenim els éssers vius. Per això, és important comprendre la visió mundial del robot, és a dir, les limitacions que té el robot per a rebre informació sobre el seu entorn o per a dur a terme accions en ell. De fet, el grau d'intel·ligència d'un robot depèn també de la capacitat de percebre l'entorn i d'interactuar entre si.
El nostre robot, Marisorgin, és un robot holònom B21 produït per l'empresa RWI, amb multitud de sensors i actuadors.
Navegació bàsica
Aquests sensors permeten al robot Marisorgin disposar d'un sistema de reflexos bàsic. Gràcies als infrarojos, és capaç d'evitar xocs amb objectes estàtics i dinàmics i, a través dels sonessis, pot calcular i centrar la marxa en el seu espai lliure esquerre i dret. Aquest sistema de reflexos es construeix sobre la base d'uns comportaments, uns patrons bàsics d'acció del robot. Ambdues es refereixen, per exemple, a comportaments “evitar objectes” i “corregir” respectivament.A més, Marisorgin té altres dos comportaments: ‘seguir l'objectiu’ i ‘parar’. El primer, amb una determinada orientació de la brúixola, impulsa al robot cap a aquesta direcció. Per part seva, ‘parar’ s'activa si el robot xoca contra un objecte i interromp el funcionament de tot el sistema.

Cada comportament, per tant, té el seu objectiu i decideix les accions que ha de realitzar el robot per a aconseguir aquest objectiu, és a dir, les instruccions que ha d'executar. Atès que aquestes ordres s'enviaran al sistema motor, s'expressen mitjançant la magnitud (quantes) i el signe (avanci o cap endarrere, esquerra o dreta) de les velocitats de rotació i translació.
Sistema de localització
Amb la navegació bàsica, el robot explora el seu entorn de manera segura. Però està a la deriva, només és capaç de navegar amb certa orientació. Perquè la marxa de Marisorgin tingui un objectiu, s'ha d'afegir la capacitat d'identificar algunes marques de l'entorn que permetin identificar els emplaçaments. Però és important analitzar la tasca des del punt de vista del robot. Buscarem marques o característiques generals (que pot detectar mitjançant sensors) i significatives (que l'ajudaran en el recorregut). Nosaltres hem triat les marques ‘passadís-gela’ i ‘bifurcació’.
El comportament ‘Sala de Passadissos’ té com a objectiu donar a conèixer la ubicació actual del robot, per al que utilitza sonessis. Tingues en compte que l'entorn del robot està format per habitacions i passadissos i, mitjançant sonessis, calcula la distància als objectes. En conseqüència, detectant que les parets estan més o menys allunyades, el robot pot saber on està (en el passadís o en una habitació).
La marca d'encreuament s'ha dissenyat amb sortides d'emergència. I és que tots els edificis públics han de disposar de senyals de sortida d'emergència en els encreuaments, característica que ens serveix per a les nostres finalitats: si el robot identifiqués els senyals dels encreuaments, seria fàcil per a nosaltres indicar l'adreça que ha de seguir per a arribar a la seva destinació.
Per a identificar els senyals de sortida d'emergència, Marisorgin presa primer imatges de l'entorn a través de la cambra. A continuació, aquestes imatges són tractades per la xarxa neuronal que s'ha preparat per a identificar els senyals de sortida d'emergència.
Sistema General de Navegació
Unint la navegació bàsica i el sistema de localització aconseguim un comportament d'alt nivell que combina tots els comportaments descrits fins ara. L'objectiu del Sistema General de Navegació, a més d'evitar col·lisions amb objectes, és dirigir el robot cap al punt d'arribada a través de les habitacions i passadissos, indicant la direcció que ha de prendre en cada encreuament.
Per a mesurar la idoneïtat del sistema de navegació proposat s'han realitzat diversos experiments amb Marisorgin en la 3a planta de la Facultat d'Informàtica de Sant Sebastià. I esperem que hàgim aconseguit l'objectiu principal, ja que el robot és capaç de navegar amb les característiques del seu entorn.
Considerem que l'aportació més important del treball és l'esforç que realitza el robot per a apropiar-se del seu entorn i aprofitar les seves característiques. De fet, moltes tècniques de navegació es basen en la construcció del mapa de l'entorn i en el lliurament del mapa al robot.
El problema d'aquesta aproximació és que el robot no és capaç de respondre adequadament davant canvis imprevistos que es produeixen en el seu entorn (una cadira o la gent dificulta el seu recorregut). En qualsevol cas, perquè el sistema exposat pot donar els seus fruits de cara al futur, ens agradaria generalitzar el sistema de navegació i adaptar-lo a altres tasques i robots. En això estem.
Robot mòbil Marisorgin
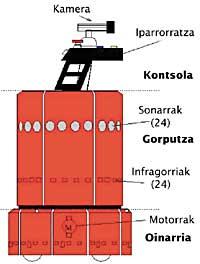
Sensors
Sonessis: Calculen la distància als objectes de l'entorn. Les lectures de Sonar perden fiabilitat en distàncies superiors a tres metres i inferiors a un metre. Infrarojos: Mesuren la proximitat dels objectes en funció de la intensitat lumínica. Només poden detectar objectes a 50 cm o menys. Sensors d'impacte: Com el seu nom indica, detecten xocs.
Brúixola: Indica l'orientació actual. Cambra: És sens dubte la més complexa dels sensors, però també la que més informació pot oferir.
Agents
Motors: realitzen els moviments necessaris per a la navegació: dos per a translació i un per a rotació.


Zu idazle
Zientzia aldizkaria

