

Robot Marisorgin

For the robot to have intelligent behavior, the control system must have several features. On the one hand, you should react in real time. It must have reflexes, in other words, rapid and adequate reaction capacity to unexpected changes in the environment. In addition, it must have a high capacity for planning, that is, capacity for reflection and decision-making on different alternatives and learning from previous mistakes.
Combining the ability to think with immediate reaction is not easy. Thinking requires time, but reactions must be immediate. Somehow, we must find in our control system an appropriate combination between reaction and planning. As the robot is a system operating in the real world, its control system is associated with processes that generate and maintain proper robotic interaction.
Every mobile robot is designed to perform a specific task. There is no universal robot for everything. In the case of Marisorgin, the navigation task we have chosen for this work is as follows: the robot will have to leave the laboratory and go to the library (from there collect some books, for example). Once there, we turn around and pass it through Otzeta's office (for Otzeta to collect the requested books). Finally, you will have to make the way back to the laboratory.
Robot
To design the robot that is going to perform this task, first of all we have to bear in mind that our vision of the world and that a robot can have are totally different, since its sensors and agents are totally different from ours.
These beings perceive the objects and events of the environment through vision, touch, smell and hearing, and our relationship with these objects is conditioned by our ability to act (mature, move, pull).
But the current technology is still far from reaching the degree of sophistication of the sensors that we have living beings. Therefore, it is important to understand the world vision of the robot, that is, the limitations that the robot has to receive information about its environment or to carry out actions in it. In fact, the degree of intelligence of a robot also depends on the ability to perceive the environment and interact with each other.
Our robot, Marisorgin, is a B21 holloom robot produced by the company RWI, with a multitude of sensors and actuators.
Basic navigation
These sensors allow the Marisorgin robot to have a basic reflex system. Thanks to the infrared, it is able to avoid collisions with static and dynamic objects and, through the sonars, can calculate and center the march in its left and right free space. This reflex system is built on behaviors, basic patterns of action of the robot. Both refer, for example, to “avoid objects” and “correct” behaviors respectively.In addition, Marisorgin has two other behaviors: ‘follow the goal’ and ‘stop’. The first, with a certain compass orientation, drives the robot in that direction. On the other hand, ‘stop’ is activated if the robot hits an object and interrupts the operation of the entire system.

Each behavior, therefore, has its objective and decides the actions that the robot must perform to achieve that objective, that is, the instructions that it must execute. Since these orders will be sent to the motor system, they are expressed by the magnitude (how many) and the sign (forward or backward, left or right) of the rotation and translation speeds.
Location system
With basic navigation, the robot explores its environment safely. But it is adrift, it is only able to navigate with some orientation. In order for Marisorgin's march to have a goal, it must be added the ability to identify some environmental marks that allow identifying the sites. But it is important to analyze the task from the robot's point of view. We will look for general marks or characteristics (which you can detect by sensors) and significant (which will help you in the journey). We have chosen the ‘pasillo-gela’ and ‘bifurcation’ brands.
The ‘Hall of Corridors’ behavior aims to make known the current location of the robot, for which it uses sonars. Keep in mind that the environment of the robot consists of rooms and corridors and, through sonars, calculates the distance to objects. Consequently, by detecting that the walls are more or less distant, the robot can know where it is (in the corridor or in a room).
The crossing mark is designed with emergency exits. All public buildings must have emergency exit signs at the crossings, a characteristic that serves our purposes: if the robot identified the signs of the crosses, it would be easy for us to indicate the direction to follow to reach its destination.
To identify emergency exit signals, Marisorgin first takes images of the environment through the camera. These images are then treated by the neural network that has been prepared to identify emergency exit signals.
General Navigation System
By joining the basic navigation and the location system we achieve a high level behavior that combines all the behaviors described so far. The objective of the General Navigation System, in addition to avoiding collisions with objects, is to direct the robot to the point of arrival through the rooms and corridors, indicating the direction to take at each crossing.
To measure the suitability of the proposed navigation system, several experiments were conducted with Marisorgin on the 3rd floor of the Computer Science Faculty of San Sebastian. And we hope we have reached the main goal, as the robot is able to navigate with the characteristics of its environment.
We consider that the most important contribution of the work is the effort made by the robot to appropriate its environment and take advantage of its characteristics. In fact, many navigation techniques are based on the construction of the environment map and the delivery of the map to the robot.
The problem with this approach is that the robot is not able to respond adequately to unexpected changes that occur in its environment (a chair or people make it difficult to travel). In any case, because the exposed system can bear fruit for the future, we would like to generalize the navigation system and adapt it to other tasks and robots. In it we are.
Mobile robot Marisorgin
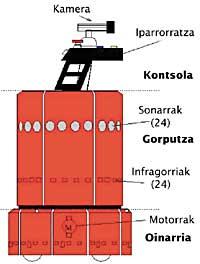
Sensors
Sonares: They calculate the distance to objects in the environment. Sonar readings lose reliability in distances greater than three meters and less than one meter. Infrared: They measure the proximity of objects according to the light intensity. They can only detect objects at 50 cm or less. Impact sensors: As the name suggests, they detect shocks.
Compass: Indicates the current orientation. Camera: It is certainly the most complex of sensors, but also the one that can offer the most information.
Agents
Engines: make the necessary movements for navigation: two for translation and one for rotation.


Zu idazle
Zientzia aldizkaria

