


Intelligence synthétique : science ou fiction ?

Depuis que nous avons conscience de notre esprit, nous avons voulu connaître l'origine et le fonctionnement de l'intelligence. Cependant, les scientifiques des champs d'étude de l'intelligence n'ont pas encore obtenu une réponse unifiée.
En l'absence d'une définition précise, l'intelligence est utilisée comme une propriété descriptive qui explique les propriétés et les capacités des individus ou des groupes. Ils se rapportent à l'intelligence : pensée, résolution de problèmes, apprentissage et mémoire, langage, intuition et créativité, conscience, survie, perception et action.
Si nous regardons la liste, nous nous rendons compte qu'il est difficile d'attraper l'intelligence avec une définition simple. Par où aborder alors la recherche de l'esprit? Comment construire un modèle incluant toutes les fonctionnalités ? Nous avons plusieurs options, dont l'intelligence artificielle.
L'intelligence artificielle (IC) est la science de la construction de machines intelligentes qui réalisent des actions concrètes. Si ces actions étaient réalisées par l'homme, il devrait utiliser son intelligence. C'est ce que définit AA Misnky, l'un de ses membres fondateurs.
Intelligence intégrée


Descartes XVII. L'AA part du dualisme proposé au XXe siècle: le corps et l'esprit sont différentes substances, la physique première et l'incorporation (spirituelle ou intellectuelle) seconde. Le corps étant un simple mécanisme, l'esprit doit nécessairement être le résultat de processus internes et d'expressions internes abstraites qui se produisent dans le cerveau. Sur la base de ce principe, les chercheurs de l'AA tentent de construire des modèles informatiques de processus mentaux.
Fondamentalement, l'intelligence peut être comprise comme un programme informatique: d'abord les données d'entrée (perception) sont collectées, puis ces données (cognition) sont traitées et finalement les données de sortie (action) sont créées.
Les systèmes qui ont été construits selon ce modèle, en définitive, simulent les processus dans lesquels l'intelligence développe inutilement le corps: raisonnements logiques, résolution de problèmes formels, jeux abstraits, etc.
Suite à cette approche, la célèbre machine Deep Blue a été construite. En 1997, Deep Blue remporte le champion du monde Kasparov aux échecs, l'un des succès les plus prestigieux de l'AA.
Les échecs sont un problème approprié pour résoudre par AA. Il s'agit d'un jeu formel, dans lequel les règles et les positions de la table sont parfaitement définies et dans lequel l'infraction implique la perte du parti. Dans une partie, connaissant l'état actuel des pièces, nous disposons de toutes les informations dont nous avons besoin sur le parti, puisque tous les mouvements qui peuvent être effectués (même s'ils sont nombreux) sont parfaitement définis.

D'autre part, le jeu se produit dans un monde statique, c'est-à-dire si les joueurs ne font pas de mouvement, rien ne change dans le jeu.
La perception du monde de la machine Deep Blue est donc limitée aux mouvements qui font le contraire, tandis que les actions qu'elle réalise dépendent des règles d'échecs. Son modèle d'intelligence est une énorme base de données de stratégies d'échecs développées par l'homme. Selon ce modèle d'intelligence, l'ordinateur doit calculer le meilleur mouvement que vous pouvez effectuer à tout moment. Et la machine Deep Blue a la capacité de calculer 200 millions de mouvements par seconde !
Donc tranquille Kasparov. Le succès de la machine Deep Blue n'a pas été basé sur son degré d'intelligence, mais sur la rapidité du calcul selon des normes concrètes.
Mais quand ils ont abandonné les mondes formels et abstraits et, en utilisant l'approche du classique AA, ils ont voulu développer des robots mobiles intelligents intégrés dans le monde réel, ils ont rencontré un grand problème inattendu : les robots construits n'étaient pas capables de s'adapter aux environnements complexes et changeants. Pourquoi ?
Dans le monde réel, contrairement aux échecs, il n'y a pas de mouvements ou de situations exactement définies. Il est trop complexe pour pouvoir s'exprimer avec un modèle. Nous pouvons faire au maximum une approximation maladroite et construire un modèle qui n'exprime qu'une partie du monde réel.
En outre, pour planifier les actions, le robot a besoin d'informations sur l'environnement, des informations détaillées sur l'état de l'environnement. Lorsque vous recevez des informations et décidez des actions selon votre modèle d'intelligence, votre environnement change constamment. Si vous prenez trop de temps pour penser, la solution adoptée par le robot peut perdre la correspondance avec le monde réel.
Conscients des limites de la vision décrite, plusieurs chercheurs ont commencé à travailler de nouvelles voies au milieu des années 1980.
Intelligence intégrée
Si le monde réel est ouvert et changeant, nous ne pouvons pas l'exprimer avec un modèle strict. L'intelligence est surtout la capacité d'un système à s'adapter à son environnement changeant. La capacité d'adaptation implique, d'une part, l'utilisation des connaissances et des règles que le système intègre et, d'autre part, la capacité de trouver de nouvelles solutions dans de nouvelles situations.

Cette nouvelle approche est basée sur la théorie de l'évolution. Si nous analysons la voie suivie par l'évolution, nous trouverons d'abord la capacité de survie et d'adaptation des êtres vivants, et bien plus tard la connaissance et le raisonnement abstrait de l'être humain. L'évolution a pris plus de temps pour développer cet aspect ou aspect de l'intelligence, prouvant qu'il est le plus difficile à atteindre.
Selon cette nouvelle approche, la compréhension et la reproduction de l'intelligence humaine exigent, en premier lieu, la réalisation de nombreuses pratiques avec des niveaux d'intelligence inférieurs.
Cette nouvelle approche de l'AA propose un modèle de bas en haut, à partir de l'ensemble de base des comportements nécessaires à la survie (bouger, manger), vers des objectifs de plus en plus complexes de façon incrémentielle (explorer l'environnement, rentrer à la maison sur le chemin le plus court). De l'interaction des comportements à un comportement global approprié ou intelligent du système artificiel.
L'intelligence, ou plutôt le comportement intelligent, découle donc de l'interaction d'un organisme, comme le robot, avec son environnement. Pour mieux illustrer cette idée, une expérience simple et surprenante avec des robots Didabots est très appropriée.
Robots nettoyants Didabots

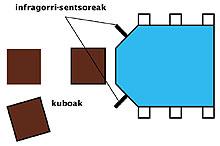
La scène ou la place est composée de deux Didabots et de nombreux cubes en mousse synthétique. Les robots sont équipés de deux capteurs infrarouges (qui permettent de mesurer l'approximation des objets) et n'ont été programmés que pour éviter les objets.
Voyons maintenant la séquence de photos qui apparaît dans l'image ci-jointe. Dans le premier temps, les cubes sont séparés au hasard sur la place. Avec le temps, nous pouvons observer que des clusters ou des ensembles se forment. La dernière image montre tous les cubes regroupés en deux grands blocs. La question posée est : En quoi travaillent les robots ? Comment décririez-vous votre comportement ?
Parmi les résultats obtenus figurent: “ils sont en train de nettoyer”, “ils essaient de regrouper les cubes”, “ils créent de l’espace libre”. Ces réponses sont adaptées du point de vue de l'observateur. Mais comme concepteurs, nous savons exactement pourquoi les robots ont été programmés pour éviter les objets!
Que s'est-il passé alors ? Les robots Didabots reçoivent des informations sur le milieu via leurs capteurs infrarouges latéraux. Ils se déplacent vers l'avant jusqu'à ce qu'un capteur détecte un cube et tournent vers l'autre côté. C'est tout ce qu'ils savent faire. Le problème est que les capteurs de gauche et de droite ne peuvent pas détecter le cube du robot face à face, et le robot continuera à pousser le cube. Mais le robot n'est pas programmé pour cela, il pousse le cube parce qu'il ne peut pas le voir !
Jusqu'à quand le cube sera-t-il poussé ? Il y a deux options: si le mouvement du cube se déplace vers la gauche ou vers la droite, les capteurs du robot le détecteront et le robot l'évitera. En outre, il est possible que le robot rencontre un autre cube à gauche ou à droite. Dans le second cas, le robot tournera également en laissant les deux cubes ensemble. Dans ce cas, nous avons déjà deux cubes ensemble, auxquels on a ajouté les possibilités d'unir les autres. Les robots ont changé leur environnement et le nouvel environnement influence le comportement des robots. Il renforce sa tendance au nettoyage.
Des résultats similaires ont été obtenus dans des expériences répétées. Par conséquent, nous pourrions dire que nous sommes en mesure de concevoir le robot nettoyant sans avoir à programmer explicitement le processus de lavage dans le robot. La tâche de nettoyage est quelque chose qui est dans l'esprit des moniteurs et non dans l'intelligence du robot. Dans le domaine de la robotique mobile, le comportement de cette expérience est généralement appelé «comportement émergent», car il a émergé de l'interaction du robot avec son environnement, sans être spécifiquement programmé pour cela.
De cette expérience, nous pouvons déduire que le comportement du robot (intelligence) découle de l'interaction avec son environnement. Nous ne pouvons pas le concevoir seulement comme un mécanisme interne, ni comprendre les résultats en analysant simplement les mécanismes internes. La capacité du robot à percevoir l'environnement et à mener des actions sur lui influencera grandement son niveau intellectuel.
Pour comprendre l'intelligence, il ne suffit donc pas d'essayer de comprendre ou de simuler le fonctionnement du cerveau (classique AA). Au contraire, l'organisme doit être considéré dans son intégralité.
L'environnement et la connaissance ne doivent pas être appris, car le monde réel est ouvert et changeant, trop complexe pour pouvoir s'exprimer par un modèle concret. La nouvelle approche des dernières années, l'Intelligence Intégrée, exploite la force d'interaction de l'organisme (robots) avec son environnement pour démêler le chemin de ce qui peut être une véritable intelligence. Et il semble que le chemin commande de construire des êtres simples dans un monde réel et complexe, au lieu de construire des êtres artificiels complexes dans des mondes simples (Deep Blue et échecs).
Cerveau humain et ordinateur

Le classique AA compare le cerveau humain à l'ordinateur. Suivant ce modèle, l'être humain serait un ordinateur à but général : il naît avec un certain matériel (corps) et est programmé par son expérience de comportement et processus de socialisation. L'intelligence serait donc un programme qui est exécuté dans le cerveau (intelligence = logiciel).
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







