


Inteligencia sintética: ¿ciencia o ficción?

Desde que tenemos conciencia de nuestra mente hemos querido saber el origen y el funcionamiento de la inteligencia. Sin embargo, los científicos de los campos de estudio de la inteligencia todavía no han conseguido una respuesta unificada.
A falta de una definición precisa, la inteligencia se utiliza como una propiedad descriptiva que explica las propiedades y capacidades de los individuos o grupos. Se relacionan con la inteligencia: pensamiento, resolución de problemas, aprendizaje y memoria, lenguaje, intuición y creatividad, conciencia, supervivencia, percepción y acción.
Si echamos un vistazo a la lista, nos daremos cuenta de que es difícil atrapar la inteligencia con una sencilla definición. ¿Por dónde abordar entonces la investigación de la mente? ¿Cómo construir un modelo que incluya todas las características? Tenemos varias opciones, entre ellas la Inteligencia Artificial.
La Inteligencia Artificial (IC) es la ciencia de la construcción de máquinas inteligentes que realizan acciones concretas. Si estas acciones fueran realizadas por el hombre, debería utilizar su inteligencia. Así lo define AA Misnky, uno de sus miembros fundadores.
Inteligencia Incorporal


Descartes XVII. La AA parte del dualismo propuesto en el siglo XX: el cuerpo y la mente son diferentes sustancias, la física primera y la incorpóreo (espiritual o intelectual) segunda. Al ser el cuerpo un mero mecanismo, la mente debe ser necesariamente el resultado de procesos internos y expresiones internas abstractas que se producen en el cerebro. En base a este principio, los investigadores de la AA intentan construir modelos de computadores de procesos mentales.
Básicamente se puede entender la inteligencia como un programa de computadores: primero se recogen los datos de entrada (percepción), luego se procesan esos datos (cognición) y finalmente se crean los datos de salida (acción).
Los sistemas que se han construido siguiendo este modelo, en definitiva, simulan los procesos en los que la inteligencia desarrolla innecesariamente el cuerpo: razonamientos lógicos, resolución de problemas formales, juegos abstractos, etc.
Siguiendo esta aproximación se construyó, por ejemplo, la famosa máquina Deep Blue. En 1997 Deep Blue vence al campeón mundial Kasparov en ajedrez, siendo uno de los éxitos más prestigiosos de la AA.
El ajedrez es un problema adecuado para resolver por AA. Se trata de un juego formal, en el que las reglas y posiciones de la tabla están perfectamente definidas y en el que la infracción implica la pérdida del partido. En una partida, conociendo el estado actual de las piezas, disponemos de toda la información que necesitamos sobre el partido, ya que todos los movimientos que se pueden realizar (aunque sean muchos) están perfectamente definidos.

Por otra parte, el juego ocurre en un mundo estático, es decir, si los jugadores no hacen movimiento, no cambia nada en el juego.
La percepción del mundo de la máquina Deep Blue se limita, por tanto, a los movimientos que realiza el contrario, mientras que las acciones que realiza dependen de las normas de ajedrez. Su modelo de inteligencia es una enorme base de datos de estrategias de ajedrez desarrolladas por el hombre. Según este modelo de inteligencia, la computadora debe calcular el mejor movimiento que puede realizar en cada momento. ¡Y la máquina Deep Blue tiene la capacidad de calcular 200 millones de movimientos por segundo!
Así que tranquilo Kasparov. El éxito de la máquina Deep Blue no se basó en su grado de inteligencia, sino en la rapidez en el cálculo según unas normas concretas.
Pero cuando abandonaron los mundos formales y abstractos y, utilizando el acercamiento del clásico AA, quisieron desarrollar robots móviles inteligentes integrados en el mundo real, se encontraron con un gran inesperado problema: los robots construidos no eran capaces de adaptarse a entornos complejos y cambiantes. ¿Por qué?
En el mundo real, a diferencia del ajedrez, no hay movimientos o situaciones definidas exactamente. Es demasiado complejo para poder expresarse con un modelo. Podemos hacer como máximo una aproximación torpe y construir un modelo que sólo exprese una parte del mundo real.
Por otra parte, para planificar las acciones, el robot necesita información sobre el entorno, información detallada sobre el estado del entorno. Mientras recibe información y decide las acciones según su modelo de inteligencia, su entorno cambia constantemente. Si se toma demasiado tiempo para pensar, la solución adoptada por el robot puede perder correspondencia con el mundo real.
Conscientes de las limitaciones de la visión descrita, varios investigadores comenzaron a trabajar nuevas vías a mediados de los ochenta.
Inteligencia Integrada
Si el mundo real es abierto y cambiante, no lo podemos expresar con un modelo estricto. La inteligencia es sobre todo la capacidad de un sistema para adaptarse a su entorno cambiante. La capacidad de adaptación implica, por un lado, el uso de los conocimientos y reglas que el sistema incorpora y, por otro, la capacidad de encontrar nuevas soluciones en situaciones nuevas.

Este nuevo enfoque se basa en la teoría de la evolución. Si analizamos el camino seguido por la evolución, primero encontraremos la capacidad de supervivencia y adaptación de los seres vivos, y mucho más tarde el conocimiento y el razonamiento abstracto del ser humano. La evolución ha tardado más en desarrollar este aspecto o aspecto de la inteligencia, demostrando que es el más difícil de alcanzar.
Según esta nueva aproximación, la comprensión y reproducción de la inteligencia humana requieren, en primer lugar, la realización de numerosas prácticas con niveles de inteligencia más bajos.
Esta nueva aproximación de la AA propone un modelo de abajo a arriba, desde el conjunto básico de comportamientos necesarios para la supervivencia (moverse, comer), hacia objetivos cada vez más complejos de forma incremental (explorar el entorno, regresar a casa por el camino más corto). Desde la interacción de los comportamientos hasta conseguir un comportamiento global adecuado o inteligente del sistema artificial.
La inteligencia, o mejor dicho, el comportamiento inteligente, surge por tanto de la interacción de un organismo, como el robot, con su entorno. Para ilustrar mejor esta idea, es muy apropiado un sencillo y sorprendente experimento con robots Didabots.
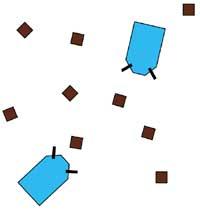
Robots limpiadores Didabots

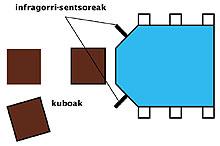
El escenario o plaza está formado por dos Didabots y numerosos cubos de espuma sintética. Los robots están equipados con dos sensores de infrarrojo (que permiten la medida de la aproximación de los objetos) y sólo han sido programados para evitar objetos.
Veamos ahora la secuencia de fotos que aparece en la imagen adjunta. En el primer momento, los cubos están separados al azar en la plaza. Con el paso del tiempo podemos observar que se están formando clusters o conjuntos. En la última imagen se muestran todos los cubos agrupados en dos grandes bloques. La pregunta planteada es ¿En qué están trabajando los robots? ¿Cómo describiría su comportamiento?
Entre los resultados obtenidos se encuentran: “están en labores de limpieza”, “están tratando de agrupar los cubos”, “están creando espacio libre”. Estas respuestas son adecuadas desde el punto de vista del observador. Pero como diseñadores sabemos exactamente para qué se han programado los robots para evitar objetos!
¿Qué ha pasado entonces? Los robots Didabots reciben información sobre el medio a través de sus sensores de infrarrojos laterales. Se desplazan hacia delante hasta que algún sensor detecta un cubo y giran hacia el otro lado. Eso es todo lo que saben hacer. El problema es que los sensores tanto de izquierda como de derecha no pueden detectar el cubo que tiene el robot frente a frente, y el robot continuará hacia delante empujando el cubo. Pero el robot no se ha programado para eso, ¡empuja el cubo porque no puede verlo!
¿Hasta cuándo va a empujar el cubo? Hay dos opciones: si con el movimiento el cubo se mueve hacia la izquierda o hacia la derecha, los sensores del robot lo detectarán y el robot lo evitará. Además, es posible que el robot se encuentre con otro cubo en su parte izquierda o derecha. En el segundo caso, el robot también girará dejando los dos cubos juntos. En este caso, ya tenemos dos cubos juntos, a los que se han añadido las posibilidades de unir otros. Los robots han cambiado su entorno y el nuevo entorno está influyendo en el comportamiento de los robots. Refuerza su tendencia a la limpieza.
En experimentos repetidos se han obtenido resultados similares. Por lo tanto, podríamos decir que estamos en condiciones de diseñar el robot limpiador sin tener que programar explícitamente el proceso de lavado en el robot. La tarea de limpieza es algo que está en la mente de los monitores y no en la inteligencia del robot. En el campo de la robótica móvil, el comportamiento de este experimento suele denominarse “comportamiento emergente”, ya que ha emergido de la interacción del robot con su entorno, sin ser específicamente programado para ello.
De este experimento podemos deducir que el comportamiento del robot (inteligencia) surge de la interacción con su entorno. No podemos diseñarlo sólo como un mecanismo interno, ni entender los resultados sólo analizando los mecanismos internos. La capacidad del robot para percibir el entorno y para llevar a cabo acciones en él influirá en gran medida en su nivel intelectual.
Para entender la inteligencia, por tanto, no basta con intentar comprender o simular el funcionamiento del cerebro (clásico AA). Por el contrario, el organismo debe ser considerado en su totalidad.
El entorno y el conocimiento no deben ser aprendidos, ya que el mundo real es abierto y cambiante, demasiado complejo para poder expresarse mediante un modelo concreto. La nueva aproximación de los últimos años, la Inteligencia Integrada, aprovecha la fuerza de interacción del organismo (robots) con su entorno para desentrañar el camino de lo que puede ser una verdadera inteligencia. Y parece que el camino manda construir seres simples en un mundo real y complejo, en lugar de construir seres artificiales complejos en mundos simples (Deep Blue y ajedrez).
Cerebro humano y computador

El clásico AA equipara el cerebro humano con el computador. Siguiendo este modelo, el ser humano sería una computadora de propósito general: nace con un determinado hardware (cuerpo) y es programada por su experiencia de comportamiento y procesos de socialización. La inteligencia sería, por tanto, un programa que se está ejecutando en el cerebro (inteligencia = software).
Buletina
Bidali zure helbide elektronikoa eta jaso asteroko buletina zure sarrera-ontzian







