

Exploitation haptique ou tactile

Sans capacité tactile, les mouvements du corps mesurés et l'interaction avec le milieu deviennent presque impossibles. De plus, si vous perdez la capacité de sentir la chaleur et la douleur, de nombreuses situations qui autrement ne produiraient pas de dommages deviennent dangereuses.
Les dispositifs qui transmettent des informations par le toucher sont appelés dispositifs de communication et, selon les prévisions, XXI. Au XXe siècle, les systèmes de communication connus entre l'être humain et le milieu peuvent révolutionner.
En ce qui concerne l'étymologie, l'origine du mot "haptika" se trouve dans le grec, où le mot haptesthai englobe tout ce qui concerne le sens tactile.
Si nous voulions concilier le sens de Haptika en une seule phrase, nous dirions : Haptika est une science qui étudie la recherche, le développement et l'utilisation de systèmes de communication tactiles entre l'être humain et le milieu.
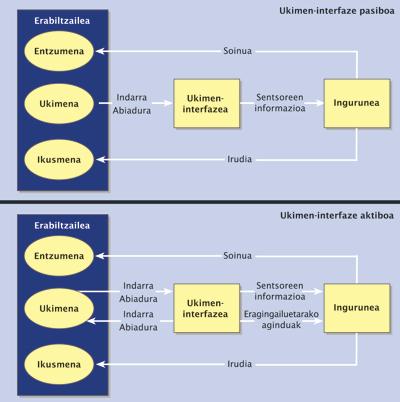
Composants de systèmes informatiques
Dans les systèmes haptiques, nous pouvons distinguer trois composants fondamentaux : utilisateur, interface ou périphérique haptique et moyen.

1. L'utilisateur est une partie importante du système haptique car il influence de manière décisive le comportement et la stabilité du système. L'utilisateur est la partie intrinsèque de la boucle de contrôle : d'une part, ses actions affectent directement l'activité du système et, d'autre part, selon cette activité, le système haptique alimente les sensations tactiles.
2. L'interface haptique est un dispositif mécanique qui sert de lien entre l'utilisateur et le milieu. Les capteurs situés là informent le système des mouvements de l'appareil tandis que les actionneurs agissent sur l'utilisateur par le toucher, transmettant l'information habile.
3. En ce qui concerne l'environnement, en général, les systèmes informatiques fonctionnent avec des environnements virtuels. Ces environnements sont présentés par des interfaces graphiques, par exemple des écrans, des vidéoprojecteurs ou des casques stéréoscopiques. L'image que l'utilisateur verra est construite par le logiciel et l'outil virtuel qu'il utilise. En outre, en fonction des mouvements et des interactions virtuelles de cet outil, les forces à rétroalimenter l'utilisateur sont calculées.
Cependant, de plus en plus de systèmes informatiques fonctionnent avec des moyens réels. Dans ces cas, l'outil utilisé par l'utilisateur est réel et peut être géré par l'utilisateur lui-même ou à distance. Les forces rétroalimentées à l'utilisateur dépendent de paramètres mesurés dans l'instrument lui-même ou dans l'environnement.
Principales caractéristiques des dispositifs pratiques
La plupart des interfaces tactiles actuellement disponibles ne font que lire les mouvements de l'utilisateur et l'utilisateur reçoit des informations audiovisuelles sur l'environnement.

Faire une lecture des mouvements de l'utilisateur est un champ très étudié, mais ce n'est pas une chose baladaise de transmettre des informations à l'utilisateur par le toucher. Pour relever ce défi, il faut connaître des domaines tels que la robotique, l'informatique, le contrôle des systèmes, la physiologie ou la psychologie.
En profitant de ces domaines de connaissances, les appareils informatiques doivent avoir une caractéristique principale pour assurer leur bon fonctionnement : la transparence. Un dispositif haptique doit remplir deux conditions pour être considéré structurellement transparent:
- L'utilisateur doit seulement sentir des forces théoriques rétroalimentées, c'est-à-dire les caractéristiques mécaniques du dispositif ne peuvent pas provoquer des changements dans les forces rétroalimentées.
- Les sensations ou forces tactiles rétroalimentées doivent refléter fidèlement la réalité.
Pour répondre à ces deux exigences, une bonne connaissance des techniques de conception mécanique est nécessaire. Si par hasard la transparence du fonctionnement du dispositif haptique n'est pas garantie, l'interaction entre l'utilisateur et le média peut être déformée.
L'inertie, le frottement, la rigidité, la moisissure, l'isotropie, le type d'entraînement, le degré de force de ceux-ci, la précision des capteurs, l'équilibre des forces de gravité, la sécurité, l'ergonomie et le coût sont nombreuses les caractéristiques à prendre en compte dans la conception des dispositifs habiles. En marge des trois dernières, toutes les autres ont une incidence directe sur la transparence.
Il est nécessaire d'atteindre un équilibre entre toutes ces caractéristiques, car l'amélioration d'une caractéristique peut entraîner une aggravation d'une autre. Par exemple, pour obtenir une rigidité élevée, on peut augmenter l'inertie des éléments mobiles du dispositif. Les moyens d'éviter cela sont l'utilisation de matériaux à haute rigidité et basse densité et l'optimisation de la conception, assurant un coût raisonnable de ceux-ci.
Système haptique
usages pratiques
La création de systèmes habiles est due à la recherche pour la médecine et le domaine militaire. Au cours de la dernière décennie, cependant, les systèmes informatiques ont non seulement fait de grands progrès dans la recherche, mais aussi dans le domaine des affaires, étendant leur utilisation de manière spectaculaire. Les principaux domaines d'application des systèmes haptiques sont actuellement:
Télécommande à distance
Il est parfois nécessaire d'introduire des robots dans des environnements étranges ou dangereux et que les utilisateurs les dirigent à distance pour éviter des situations dangereuses. Dans ces circonstances, il est utile que l'utilisateur reçoive une rétroaction tactile des œuvres ou des actions du robot, ainsi que des informations audiovisuelles. Des exemples clairs des situations décrites sont les centrales nucléaires, les véhicules autonomes sous-marins et spatiaux, ainsi que les robots de détection et de désactivation des explosifs.

Dans d'autres applications, il peut être intéressant de refléter les mouvements de l'utilisateur à plus grande échelle. Les interfaces pratiques permettent à l'utilisateur de diriger dans son environnement, avec une grande facilité, des zones de travail de différentes tailles via une zone de travail fixe et limitée.
Exercices d'entraînement
L'objectif de ces systèmes est de former les utilisateurs dans des environnements virtuels afin qu'ils puissent effectuer des exercices similaires dans le monde réel d'une manière ordonnée. L'environnement est créé par ordinateur et l'interface habile est conçue en fonction du type d'exercice. En reculant à travers des interfaces tactiques les forces que l'utilisateur sentirait dans la réalité, on peut atteindre un haut degré de réalisme et, en même temps, les erreurs de l'utilisateur n'ont pas de conséquences fatales dans la réalité.
Des exemples de ces systèmes sont les systèmes d'entraînement médical ou les simulateurs de véhicules à des fins militaires et civiles.
Conception assistée par ordinateur
Les appareils informatiques permettent d'analyser des modèles conçus par ordinateur sans maquettes. Cela permet d'économiser du temps et des dépenses, de corriger les erreurs et d'effectuer au préalable une simulation de montage et d'entretien. Ces exercices peuvent éviter de nombreux problèmes et changements de conception qui peuvent apparaître plus tard.

Loisirs
La puissante industrie du loisir est devenue, ces dernières années, l'un des domaines d'application les plus importants des systèmes habiles. Jusqu'à présent, les jeux vidéo et les systèmes de réalité virtuelle ont utilisé la communication audiovisuelle comme réponse aux actions de l'utilisateur. Sur cette voie, cependant, il est difficile de faire de grandes étapes et si vous voulez impliquer davantage l'utilisateur dans les jeux, vous devez aborder les possibilités offertes par le toucher.
Pour l'avenir, des progrès importants sont attendus par les principaux fournisseurs de jeux vidéo. Aujourd'hui, les nouveaux appareils informatiques sont en voie de développement, avec un degré de réalisme croissant des sensations qu'ils génèrent et des prix accessibles à court terme.
Auto-conduite
Les dispositifs habiles sont également venus à l'industrie automobile. Les voitures offrent de plus en plus d'éléments supplémentaires (radio, téléphone mains libres, climatisation, navigateur, adaptation suspension, etc. ), et les conducteurs sont plongés dans différents écrans et menus à chaque fois pour les corriger. C'est pourquoi les automobilistes ont commencé à utiliser des appareils tactiques pour faciliter le travail du conducteur et éviter une moindre attention sur la route.
D'autre part, les principaux fabricants travaillent sur la conception de pédales haptiques. Une pédale de ce type alimenterait les forces au conducteur comme prescrit par le système de contrôle de vitesse ou de freinage assisté.

En regardant vers l'avenir
Il est difficile de prévoir quelle sera la trajectoire future des systèmes haptiques et la vitesse de développement de cette technologie. En fait, qui pouvait prévoir le XX. Téléviseurs numériques plats de 100 pouces au milieu du siècle ?
La standardisation des appareils informatiques, la réduction des coûts et la capacité de configuration que vous souhaitez sont les principaux objectifs à court terme. La réalisation de ces caractéristiques faciliterait la propagation des dispositifs informatiques, cependant, serait une tâche en suspens, surtout dans le degré de réalisme des sensations rétroalimentées.
Cependant, compte tenu de la large gamme d'utilisations des systèmes haptiques et des vertus remarquables, ce ne serait pas une affirmation absurde d'affirmer que les êtres humains et les machines et les interfaces qui nous entourent nous trouvons dans l'antichambre d'une révolution.
Zu idazle
Zientzia aldizkaria

