

Explotación háptica o táctil

Sin capacidad táctil, los movimientos del cuerpo medidos y la interacción con el medio se convierten en casi imposibles. Más aún, si se pierde la capacidad de sentir el calor y el dolor, muchas situaciones que de otra manera no producirían daño se convierten en peligrosas.
Los dispositivos que transmiten información a través del tacto se denominan dispositivos hápticos y, según las previsiones, XXI. En el siglo XX pueden revolucionar los conocidos sistemas de comunicación entre el ser humano y el medio.
En lo que respecta a la etimología, el origen de la palabra "haptika" se encuentra en el griego, donde la palabra haptesthai engloba todo lo relacionado con el sentido táctil.
Si quisiéramos compaginar el significado de Haptika en una sola frase, diríamos: Haptika es una ciencia que estudia la investigación, el desarrollo y el uso de sistemas de comunicación táctiles entre el ser humano y el medio.
Componentes de sistemas hápticos
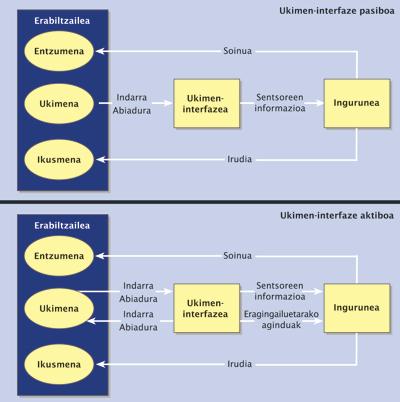
En los sistemas hápticos podemos distinguir tres componentes fundamentales: usuario, interfaz o dispositivo háptico y medio.

1. El usuario es una parte importante del sistema háptico ya que influye decisivamente en el comportamiento y estabilidad del sistema. El usuario es la parte intrínseca del bucle de control: por un lado, sus acciones afectan directamente a la actividad del sistema y, por otro, según esta actividad, el sistema háptico retroalimenta las sensaciones táctiles.
2. La interfaz háptica es un dispositivo mecánico que sirve de enlace entre el usuario y el medio. Los sensores allí situados informan al sistema de los movimientos del dispositivo mientras que los actuadores actúan sobre el usuario mediante el tacto, transmitiendo información háptica.
3. En cuanto al entorno, en general, los sistemas hápticos trabajan con entornos virtuales. Estos entornos se presentan mediante interfaces gráficos, es decir, pantallas, videoproyectores o cascos estereoscópicos. La imagen que verá el usuario se construye mediante software y la herramienta virtual que utiliza. Asimismo, en función de los movimientos e interacciones virtuales de esta herramienta, se calculan las fuerzas a retroalimentar al usuario.
Sin embargo, cada vez son más los sistemas hápticos que operan con medios reales. En estos casos, la herramienta utilizada por el usuario es real y puede ser manejada por el propio usuario o remota. Las fuerzas retroalimentadas al usuario dependen de parámetros medidos en el propio instrumento o en el entorno.
Características principales de los dispositivos hápticos
La mayoría de las interfaces táctiles disponibles en la actualidad no hacen más que leer los movimientos del usuario y el usuario recibe información audiovisual del entorno.

Hacer una lectura de los movimientos del usuario es un campo muy estudiado, pero no es una cosa baladí transmitir información al usuario a través del tacto. Para afrontar este reto es necesario el conocimiento de áreas como la robótica, la informática, el control de sistemas, la fisiología o la psicología.
Aprovechando estas áreas de conocimiento, los dispositivos hápticos deben tener una característica principal para garantizar su correcto funcionamiento: la transparencia. Un dispositivo háptico debe cumplir dos condiciones para poder ser considerado estructuralmente transparente:
- El usuario sólo debe sentir fuerzas teóricas retroalimentadas, es decir, las características mecánicas del dispositivo no pueden provocar cambios en las fuerzas retroalimentadas.
- Las sensaciones o fuerzas táctiles retroalimentadas deben reflejar fielmente la realidad.
Para poder cumplir estos dos requisitos es necesario un buen conocimiento de las técnicas de diseño mecánico. Si por casualidad no se garantiza la transparencia en el funcionamiento del dispositivo háptico, la interacción entre el usuario y el medio puede distorsionarse.
La inercia, el rozamiento, la rigidez, la holgura, la isotropía, el tipo de accionamiento, el grado de fuerza de los mismos, la precisión de los sensores, el equilibrio de las fuerzas de gravedad, la seguridad, la ergonomía y el coste son muchas las características a tener en cuenta en el diseño de los dispositivos hápticos. Al margen de las tres últimas, todas las demás tienen una incidencia directa en la transparencia.
Es necesario lograr un equilibrio entre todas estas características, ya que la mejora de una característica puede suponer un empeoramiento de otra. Por ejemplo, para conseguir una elevada rigidez, se puede aumentar la inercia de los elementos móviles del dispositivo. Los medios para evitarlo son la utilización de materiales de alta rigidez y baja densidad y la optimización del diseño, asegurando un coste razonable de los mismos.
Sistema háptico
usos
La creación de sistemas hápticos se debe a la investigación para la medicina y el ámbito militar. En la última década, sin embargo, los sistemas hápticos no sólo han dado grandes avances en la investigación, sino también en el ámbito empresarial, extendiendo su uso de forma espectacular. Los principales campos de aplicación de los sistemas hápticos en la actualidad son:
Control remoto
En ocasiones es necesario introducir robots en entornos extraños o peligrosos y que los usuarios los dirijan remotamente para evitar situaciones peligrosas. En estas circunstancias, resulta útil que el usuario reciba una retroalimentación táctil de las obras o acciones del robot, además de la información audiovisual. Ejemplos claros de las situaciones descritas son las centrales nucleares, los vehículos autónomos submarinos y espaciales, así como los robots de detección y desactivación de explosivos.

En otros usos puede ser interesante reflejar los movimientos del usuario a mayor escala. Las interfaces hápticas permiten al usuario dirigir en su entorno, con gran facilidad, áreas de trabajo de diferentes tamaños mediante un área de trabajo fija y limitada.
Ejercicios de entrenamiento
El objetivo de estos sistemas es formar a los usuarios en entornos virtuales para que puedan realizar ejercicios similares en el mundo real de una manera ordenada. El entorno se crea por ordenador y el interfaz háptico se diseña en función del tipo de ejercicio. Retroalimentando a través de interfaces hápticos las fuerzas que el usuario sentiría en la realidad, se puede alcanzar un alto grado de realismo y, al mismo tiempo, los errores del usuario no tienen consecuencias fatales en la realidad.
Ejemplos de estos sistemas son los sistemas de entrenamiento médico o los simuladores de vehículos con fines militares y civiles.
Diseño asistido por ordenador
Los dispositivos hápticos permiten analizar modelos diseñados por ordenador sin necesidad de maquetas. Esto permite ahorrar tiempo y gastos, corregir errores y realizar previamente una simulación de montaje y mantenimiento. Estos ejercicios pueden evitar muchos problemas y cambios de diseño que pueden aparecer más adelante.

Ocio
La potente industria del ocio se ha convertido en los últimos años en uno de los campos de aplicación más importantes de los sistemas hápticos. Hasta el momento, los videojuegos y los sistemas de realidad virtual han utilizado la comunicación audiovisual como respuesta a las acciones del usuario. En este camino, sin embargo, es difícil dar grandes pasos y si se quiere involucrar aún más al usuario en los juegos es necesario abordar las posibilidades que ofrece el tacto.
De cara al futuro, se esperan avances importantes de la mano de los principales proveedores de videojuegos. En la actualidad, los nuevos dispositivos hápticos se encuentran en vías de desarrollo, con un grado de realismo creciente de las sensaciones que generan y unos precios accesibles a corto plazo.
Auto-conducción
Los dispositivos hápticos han llegado también a la industria del automóvil. Los coches ofrecen cada vez más elementos adicionales (radio, teléfono manos libres, aire acondicionado, navegador, adaptación suspensión, etc. ), y los conductores se sumergen en diferentes pantallas y menús cada vez para corregirlos. Por ello, los automovilistas han comenzado a utilizar dispositivos hápticos para facilitar la labor del conductor y evitar que se preste menos atención en la carretera.
Por otro lado, los principales fabricantes están trabajando en el diseño de pedales hápticos. Un pedal de este tipo retroalimentaría las fuerzas al conductor según lo prescrito por el sistema de control de velocidad o freno asistido.

Mirando al futuro
Es difícil predecir cuál será la trayectoria futura de los sistemas hápticos y la velocidad de desarrollo de esta tecnología. De hecho, quién podía prever el XX. ¿Televisiones digitales planas de 100 pulgadas a mediados del siglo?
La estandarización de dispositivos hápticos, la reducción de costes y la capacidad de configuración a medida que se desee son las principales metas a corto plazo. El logro de estas características facilitaría la propagación de los dispositivos hápticos, sin embargo, sería una tarea pendiente, sobre todo en el grado de realismo de las sensaciones retroalimentadas.
Sin embargo, teniendo en cuenta el amplio abanico de usos de los sistemas hápticos y las notables virtudes, no sería una afirmación absurda afirmar que los seres humanos y las máquinas e interfaces que nos rodean nos encontramos en la antesala de una revolución.
Zu idazle
Zientzia aldizkaria

