

Simulation de voyage dans le processus de conception de convertisseurs de puissance
Martínez de Alegría Mancisidor, Iñigo
EHUko Elektronika Aplikatuko Ikerkuntza Taldeko (APERT) ikertzailea
L'utilisation de la simulation par ordinateur est largement répandue dans différents domaines de la science et de la technologie. Dans de nombreux cas, les systèmes à analyser sont généralement très complexes et il est très difficile d'obtenir des solutions analytiques. Dans ces cas, l'une des solutions est la simulation par ordinateur.
Lorsque vous souhaitez simuler un système réel, vous devez d'abord définir les équations qui décrivent le comportement dynamique de ce système. Ces équations génèrent un modèle système sur l'ordinateur. Il est ainsi possible d'analyser le fonctionnement du système, en modifiant les valeurs des variables on peut faire des prédictions sur le comportement du système.
Les simulacres sont effectués pas à pas. Chaque étape de simulation permet de résoudre les équations décrivant le comportement du système par des algorithmes d'intégration (Euler, Runge-Kutta, etc.) Les resoluteurs basés (solver, en anglais) sont appliqués. De plus, à chaque étape de simulation correspond un temps de simulation. Ce temps indique si le système simulé peut être à la fois dans le monde réel et parfois. Pour déterminer ce temps de simulation, le résolveur ajoute au temps de simulation de l'étape précédente un temps déterminé, appelé longueur du passage.
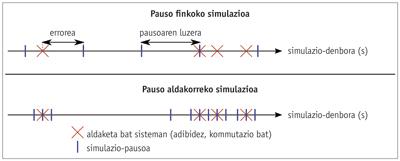
Fondamentalement, les resoluteurs peuvent être divisés en deux grands groupes : ceux exécutés à pas fixe et ceux exécutés à pas variable. On dit qu'une simulation s'exécute à pas fixe lorsque la longueur du pas reste fixe le long de la simulation. En revanche, dans les simulations à pas variable, la longueur du pas varie en fonction de la dynamique du système. En ce sens, le passage de simulation est raccourci si le système change considérablement dans une période donnée, améliorant ainsi la précision de la simulation. Cependant, en période de faible variation, le passage s'allonge. Pour déterminer la longueur de l'étape, les resoluteurs à pas variable utilisent des algorithmes spéciaux. Cela permet un contrôle efficace du nombre d'étapes à effectuer.
Simulation de commutateurs
Il existe actuellement des convertisseurs de puissance partout, comme des bateaux, des moulins à vent et des véhicules électriques. Les convertisseurs de puissance sont utilisés dans les systèmes de conversion d'énergie, dont le but est la transformation de l'énergie électrique de manière contrôlée. En ce sens, la simulation par ordinateur joue un rôle important dans les premières parties du processus de conception de ces convertisseurs, car elle permet d'analyser le comportement du convertisseur avant de construire le prototype physique.
Normalement, les convertisseurs de puissance sont formés par des interrupteurs (qui sont construits par des dispositifs semi-conducteurs) et leur configuration permet la construction de différentes topologies (redresseurs, convertisseurs matriciels, etc. ). Les commutateurs sont considérés comme contrôlés lorsqu'il est possible de contrôler les moments d'activation ou de désactivation. Ainsi, les algorithmes de contrôle et de modulation appropriés permettent de contrôler correctement les moments d'activation et de désactivation des interrupteurs. Ainsi, le convertisseur peut synthétiser dans ses entrées et sorties des références de tension et de courant établies par le contrôle.
Il existe plusieurs options de simulation de commutateurs de convertisseurs de puissance. D'une part, on peut utiliser des équations décrivant le comportement des dispositifs à semi-conducteur, et d'autre part on peut considérer que les disjoncteurs sont idéaux. L'utilisation de modèles mathématiques spécifiques de dispositifs semi-conducteurs est très utile quand il s'agit, par exemple, d'analyser l'efficacité et les pertes du convertisseur. Cependant, la complexité du modèle à simuler augmente considérablement, il faut donc trop de temps pour effectuer des simulations. Au contraire, si l'objectif est l'analyse du système de contrôle du convertisseur, il suffit de considérer que les disjoncteurs sont idéaux, c'est-à-dire que lorsqu'ils sont allumés ils créent un court-circuit et quand ils sont éteints ils restent en circuit ouvert.
La simulation de systèmes commutés, en particulier de convertisseurs de puissance, a ses défis. Par exemple, si vous utilisez un résolveur à pas fixe, il est clair que les instances de commutation et les étapes de simulation des disjoncteurs ne doivent pas être synchronisées. Par conséquent, si un interrupteur doit être activé entre deux étapes de simulation, la simulation ne prend pas en compte l'effet de cette activation jusqu'à la prochaine étape de simulation. Ces erreurs entraînent l'apparition de composants harmoniques à basse fréquence dans les courants et les tensions synthétisés par le convertisseur. Ces composants harmoniques sont produits à la suite du résolveur utilisé et n'ont pas à voir avec le comportement réel du convertisseur. Ce phénomène est appelé jitter (c'est-à-dire perturbations irrégulières). Cependant, l'erreur peut être réduite si la longueur du passage est réduite, la simulation ralentit considérablement en augmentant considérablement le nombre d'opérations à effectuer. Avec des solutions à pas variable, il est possible de compenser le jitter sans modérer la simulation.

Interpolation accompagnatrice
Les algorithmes de contrôle dans les convertisseurs de puissance modernes sont de plus en plus complexes. En même temps, les fréquences de commutation des disjoncteurs sont dans de nombreux cas très élevées (le convertisseur matriciel en est un bon exemple). Ainsi, malgré l'utilisation de résolutionneurs à pas variables, les simulations restent très lentes. En conséquence, le nombre de simulations qui peuvent être effectuées dans le processus de conception en l'absence de solutions est très limité.
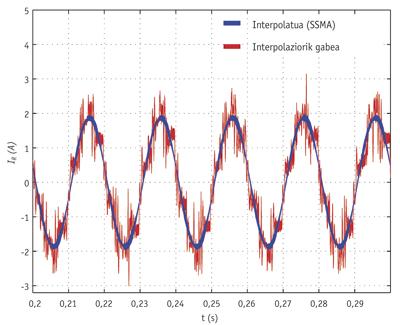
Dans ces cas, la meilleure solution est d'utiliser des techniques d'interpolation. L'interpolation permet d'approcher la valeur des variables à un point entre deux étapes de simulation. De cette façon, vous pouvez augmenter la longueur du passage en gardant une bonne précision. Cependant, il faut chercher un compromis entre la longueur et la précision du passage, car plus le passage est long, plus la simulation est rapide, mais en même temps la précision est perdue. Il existe plusieurs techniques d'interpolation telles que TAM ( Time Averaging Method ), SSMA ( Switching State Matrix Averaging Method ) et l'interpolation linéaire. Par exemple, l'utilisation de la technique d'interpolation SSMA au lieu d'un résolveur passe-variable pour simuler le convertisseur matriciel permet d'économiser 95% de temps sur la simulation.
Simulation en temps réel
Comme déjà mentionné, dans les premières phases de la conception des convertisseurs de puissance et de leurs contrôleurs, la norme de simulation par ordinateur joue un rôle très important. D'autre part, il existe un autre type de simulation, appelé simulation en temps réel, très utile pour les dernières phases du processus de conception.
Quand un modèle particulier est exécuté au même rythme que le monde réel, il est dit que ce modèle est simulé en temps réel. C'est-à-dire, lorsqu'une étape de simulation est exécutée, le temps de simulation correspondant à cette étape coïncide avec le temps écoulé dans le monde réel depuis le début de la simulation.
Pour pouvoir simuler en temps réel, il est nécessaire de résoudre les équations à résoudre à chaque étape de simulation avant de commencer à exécuter la prochaine étape de simulation. La complexité des calculs nécessaires pour simuler les convertisseurs de puissance rend nécessaire d'utiliser des dispositifs spéciaux à haute capacité de calcul qui permettent leur simulation en temps réel. Depuis le début, des DSPs et des simulateurs hybrides (avec partie analogique et numérique) ont été utilisés pour simuler des systèmes de puissance en temps réel. Cependant, les technologies basées sur les microprocesseurs ont été très bien accueillies ces dernières années. Le superordinateur Hypersim d'Hydro Québec et le simulateur numérique en temps réel RT-Lab eMEGAsim d'Opal-rat en sont un exemple.
Fondamentalement, ces simulateurs numériques basés sur des microprocesseurs sont des groupes PC (cluster, en anglais). Ces systèmes utilisent un calcul parallèle qui permet d'obtenir une capacité de calcul très élevée. Dans ces systèmes, l'utilisation de resoluteurs à pas fixe est obligatoire, car les resoluteurs à pas variable ne sont pas déterministes (on ne sait pas combien de temps il faut pour résoudre chaque étape). En outre, la longueur minimale du passage est limitée par deux facteurs. D'une part, l'étape doit être suffisamment longue pour pouvoir effectuer tous les calculs, et d'autre part elle doit être supérieure au retard dû aux communications entre microprocesseurs. Par exemple, dans la simulation en temps réel de nombreux convertisseurs de puissance, la longueur minimale du passage dans eMEGsim est de 10”, de sorte que la longueur du passage est relativement grande, il est donc nécessaire d'utiliser des techniques d'interpolation pour obtenir des résultats concrets si vous souhaitez simuler les convertisseurs de puissance en temps réel.

Ces simulateurs en temps réel disposent d'entrées et sorties analogiques et numériques. Ainsi, le modèle simulé en temps réel peut communiquer avec le monde réel. De même, le simulateur doit être capable de calculer les erreurs dues au manque de synchronisation entre les signaux de commutation et les étapes de simulation qu'il peut recevoir des entrées numériques, informations nécessaires à l'exécution correcte des algorithmes d'interpolation. En même temps, il est important que le simulateur puisse envoyer des signaux d'activation et de désactivation de commutateurs avec une grande précision via des sorties numériques. Par exemple, ces fonctions peuvent être exécutées à l'aide d'appareils numériques rapides FPGA (Field Programmable Gate Array). Ces caractéristiques permettent de réaliser deux modes de simulation en temps réel : contrôle de prototypage rapide et simulation en temps réel Hardware in the Loop (HIL).
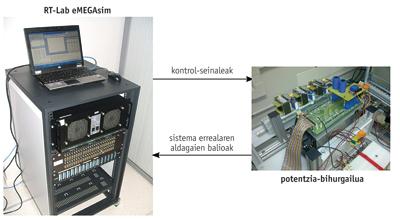
Le contrôle de prototypage rapide est une méthodologie très connue qui a été utilisée pendant plusieurs années dans la conception d'algorithmes de contrôle des convertisseurs. Dans les systèmes réels prêts à être commercialisés, la commande est déployée sur un appareil électronique donné. Dans le contrôle de prototypage rapide, au contraire, le contrôle du système est simulé en temps réel dans le simulateur numérique et le système à contrôler, dans ce cas le convertisseur, est réel. Le simulateur numérique se connecte au prototype physique en boucle fermée. De cette façon, le simulateur recueille les valeurs des variables à contrôler du prototype réel et envoie au convertisseur des signaux d'activation et de désactivation des interrupteurs. Cette technique permet de dépasser le pont existant entre la simulation et le monde réel, en réduisant le processus de conception du convertisseur et en réduisant le temps de commercialisation.
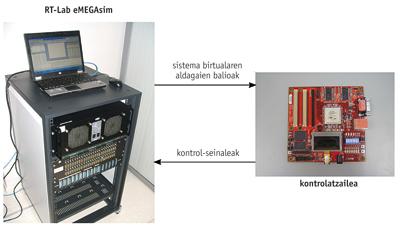
D'autre part, la simulation HIL en temps réel a été largement utilisée dans l'automobile et l'aéronautique. Cependant, la pratique en électronique de puissance est relativement nouvelle. Dans cette modalité, c'est exactement le contraire de ce qui est fait dans le contrôle du prototypage rapide, c'est-à-dire que le convertisseur est simulé, tandis que le contrôleur est réel. De cette façon, le modèle fidèle du système à contrôler dans le simulateur numérique est exécuté en temps réel et contrôlé par un contrôleur réel. La simulation HIL en temps réel est très utile dans le processus de conception des convertisseurs, car elle permet d'analyser le fonctionnement du contrôleur physique dans des conditions de fonctionnement normales et extrêmes du système sans compromettre aucun prototype cher.
Comme vous pouvez le constater dans cet article, la simulation est un excellent outil de travail pour la conception de systèmes de puissance avec différentes possibilités.
Bibliographie Bibliographie
Ce travail a été réalisé avec le soutien de l'Université du Pays Basque/Euskal Herriko Unibertsitatea, du projet S-PE09UN08 SAIOTEK du Gouvernement Basque et des subventions (IT394-10) pour impulser les activités des groupes de recherche du système universitaire basque du Département d'Éducation, Universités et Gouvernement Basque.
Zu idazle
Zientzia aldizkaria

