

Simulació de viatges en el procés de disseny de convertidors de potència
Martínez de Alegría Mancisidor, Iñigo
EHUko Elektronika Aplikatuko Ikerkuntza Taldeko (APERT) ikertzailea
L'ús de la simulació per ordinador està àmpliament estès en diferents àmbits de la ciència i la tecnologia. En molts casos, els sistemes a analitzar solen ser molt complexos i és molt difícil obtenir solucions analítiques. En aquests casos, una de les solucions és la simulació per ordinador.
Quan es desitja simular un sistema real, s'han de definir en primer lloc les equacions que descriuen el comportament dinàmic d'aquest sistema. Aquestes equacions generen un model de sistema en l'ordinador. D'aquesta forma és possible analitzar el funcionament del sistema, modificant els valors de les variables es poden fer prediccions sobre el comportament del sistema.
Els simulacres es realitzen pas a pas. En cada pas de simulació es resolen equacions que descriuen el comportament del sistema mitjançant algorismes d'integració (Euler, Runge-Kutta, etc.) s'apliquen els resolutores basats (solver , en anglès). A més, a cada pas de simulació li correspon un temps de simulació. Aquest temps indica si el sistema simulat pot estar tant en el món real com a vegades. Per a determinar aquest temps de simulació, el resolutor afegeix al temps de simulació del pas anterior un temps determinat, denominat longitud del pas.
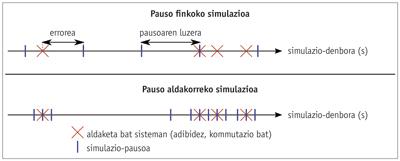
Bàsicament, els resolutores es poden dividir en dos grans grups: els executats a pas fix i els executats a pas variable. Es diu que una simulació s'executa a pas fix quan la longitud del pas es manté fixa al llarg de la simulació. Per contra, en simulacions de pas variable, la longitud del pas varia en funció de la dinàmica del sistema. En aquest sentit, el pas de simulació s'escurça si en un determinat període de temps el sistema canvia considerablement, millorant així la precisió de la simulació. No obstant això, en moments de poca variació, el pas s'allarga. Per a determinar la longitud del pas, els resolutores de pas variable utilitzen algorismes especials. Això permet un control eficient del nombre de passos a realitzar.
Simulant interruptors
Actualment existeixen convertidors de potència per onsevulla, com a vaixells, molins de vent i vehicles elèctrics. Els convertidors de potència s'utilitzen en sistemes de conversió d'energia, l'objectiu de la qual és la transformació d'energia elèctrica de manera controlada. En aquest sentit, la simulació per ordinador té un important paper en les primeres parts del procés de disseny d'aquests convertidors, ja que permet analitzar el comportament del convertidor abans de construir el prototip físic.
Normalment, els convertidors de potència estan formats per interruptors (que es construeixen mitjançant dispositius semiconductors) i la seva configuració permet la construcció de diferents topologies (rectificadors, convertidors matricials, etc.). Es considera que els interruptors són controlats quan és possible controlar els moments d'activació o desactivació d'aquests. Així, mitjançant els algorismes de control i modulació adequats és possible controlar adequadament els moments d'activació i desactivació dels interruptors. D'aquesta manera, el convertidor pot sintetitzar en les seves entrades i sortides referències de tensió i corrent establertes pel control.
Existeixen diverses opcions de simulació d'interruptors de convertidors de potència. D'una banda, es poden utilitzar equacions que descriguin el comportament dels dispositius semiconductors, i d'altra banda es pot considerar que els interruptors són ideals. L'ús de models matemàtics específics de dispositius semiconductors és molt útil quan es tracta, per exemple, d'analitzar l'eficiència i les pèrdues del convertidor. No obstant això, la complexitat del model a simular augmenta considerablement, per la qual cosa es triga massa temps a realitzar simulacions. Per contra, si l'objectiu és l'anàlisi del sistema de control del convertidor, n'hi ha prou amb considerar que els interruptors són ideals, és a dir, que quan s'encenen creen un curtcircuit i quan s'apaguen queden en circuit obert.
La simulació de sistemes commutats, especialment de convertidors de potència, té els seus reptes. Per exemple, si s'utilitza un resolutor de pas fix, és clar que els instants de commutació i els passos de simulació dels interruptors no tenen per què ser sincronitzats. Per això, si un interruptor necessita activar-se entre dos passos de simulació, la simulació no té en compte l'efecte d'aquesta activació fins al següent pas de simulació. Aquests errors donen lloc a l'aparició de components harmònics de baixa freqüència en els corrents i tensions sintetitzades pel convertidor. Aquests components harmònics es produeixen com a conseqüència del resolutor utilitzat i no tenen a veure amb el comportament real del convertidor. Aquest fenomen es denomina jitter (és a dir, pertorbacions irregulars). No obstant això, l'error pot reduir-se si es redueix la longitud del pas, a canvi la simulació s'alenteix considerablement en augmentar considerablement el nombre d'operacions a realitzar. Amb solucions de pas variable és possible compensar al jitter sense moderar tant la simulació.

Interpolació acompanyant
Els algorismes de control en els moderns convertidors de potència són cada vegada més complexos. Al mateix temps, les freqüències de commutació dels interruptors són en molts casos molt altes (el convertidor matricial és un bon exemple d'això). Per això, malgrat utilitzar resolutores amb passos variables, les simulacions continuen sent molt lentes. En conseqüència, el nombre de simulacions que es poden dur a terme en el procés de disseny en absència de solucions està molt limitat.
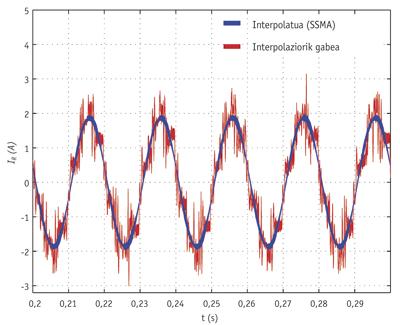
En aquests casos, la millor solució és utilitzar tècniques d'interpolació. La interpolació permet aproximar el valor de les variables en un punt entre dos passos de simulació. D'aquesta forma es pot augmentar la longitud del pas mantenint una bona precisió. No obstant això, cal buscar un compromís entre la longitud i la precisió del pas, ja que com més llarg sigui el pas, la simulació és més ràpida, però alhora es perd precisió. Existeixen diverses tècniques d'interpolació com a TAM ( Time Averaging Method ), SSMA ( Switching State Matrix Averaging Method ) i la interpolació lineal. Per exemple, la utilització de la tècnica d'interpolació SSMA en lloc d'un resolutor de pas variable per a simular el convertidor matricial permet estalviar un 95% de temps en la simulació.
Simulant en temps real
Com ja s'ha esmentat, en les primeres fases del disseny dels convertidors de potència i els seus controladors, l'estàndard de simulació per ordinador té un paper molt important. D'altra banda, existeix un altre tipus de simulació, denominada simulació en temps real, molt útil per a les últimes fases del procés de disseny.
Quan un determinat model s'executa al mateix ritme que el món real, es diu que aquest model s'està simulant en temps real. És a dir, quan s'executa un pas de simulació, el temps de simulació corresponent a aquest pas coincideix amb el temps transcorregut en el món real des de l'inici de la simulació.
Per a poder simular en temps real és necessari resoldre les equacions a resoldre en cada pas de simulació abans de començar a executar el següent pas de simulació. La complexitat dels càlculs necessaris per a simular els convertidors de potència fa necessari utilitzar dispositius especials d'alta capacitat de càlcul que permetin la seva simulació en temps real. Des del principi, s'han utilitzat DSPs i simuladors híbrids (amb part analògica i digital) per a simular sistemes de potència en temps real. No obstant això, les tecnologies basades en microprocessadors han tingut molt bon acolliment en els últims anys. Exemple d'això són la supercomputadora Hypersim d'Hydro Quebec i el simulador digital en temps real RT-Lab eMEGAsim d'Opal-rat.
Bàsicament, aquests simuladors digitals basats en microprocessadors són grups PC (clúster, en anglès). Aquests sistemes utilitzen una computació paral·lela que permet obtenir una capacitat de càlcul molt elevada. En aquests sistemes és obligatori l'ús de resolutores de pas fix, ja que els resolutores de pas variable no són deterministes (no es pot saber quant temps es triga a resoldre cada pas). D'altra banda, la longitud mínima del pas està limitada per dos factors. D'una banda, el pas ha de ser prou llarg com per a poder realitzar tots els càlculs, i d'altra banda ha de ser major que el retard degut a les comunicacions entre microprocessadors. Per exemple, en la simulació en temps real de molts convertidors de potència, la longitud mínima del pas en eMEGsim és de 10”, per la qual cosa la longitud del pas és relativament gran, per la qual cosa és necessari utilitzar tècniques d'interpolació per a obtenir resultats concrets si es desitja simular els convertidors de potència en temps real.

Aquests simuladors en temps real disposen d'entrades i sortides analògiques i digitals. D'aquesta forma, el model simulat en temps real pot comunicar-se amb el món real. Així mateix, el simulador haurà de ser capaç de calcular els errors deguts a la falta de sincronització entre els senyals de commutació i els passos de simulació que pot rebre de les entrades digitals, informació necessària per a la correcta execució dels algorismes d'interpolació. Al mateix temps, és important que el simulador pugui enviar senyals d'activació i desactivació d'interruptors amb gran precisió a través de sortides digitals. Per exemple, aquestes funcions es poden realitzar utilitzant dispositius digitals ràpids FPGA ( Field Programable Gate Array ). Aquestes característiques permeten realitzar dues modalitats de simulació en temps real: control de prototipado ràpid i simulació en temps real Maquinari in the Loop (HIL).
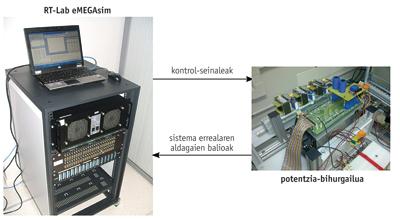
El control de prototipado ràpid és una metodologia molt coneguda que ha estat utilitzada durant diversos anys en el disseny d'algorismes de control de convertidors. En sistemes reals llestos per a comercialitzar, el control s'implementa en un dispositiu electrònic determinat. En el control de prototipado ràpid, per contra, el control del sistema se simula en temps real en el simulador digital i el sistema que es desitja controlar, en aquest cas el convertidor, és real. El simulador digital es connecta al prototip físic en bucle tancat. D'aquesta forma, el simulador recull els valors de les variables a controlar del prototip real i alhora envia al convertidor assenyalis d'activació i desactivació d'interruptors. Aquesta tècnica permet superar el pont existent entre la simulació i el món real, reduint el procés de disseny del convertidor i reduint el temps de comercialització.
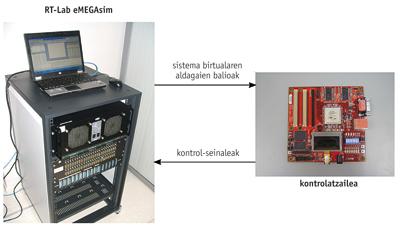
D'altra banda, la simulació HIL en temps real ha estat àmpliament utilitzada en automoció i aeronàutica. No obstant això, la pràctica en electrònica de potència és relativament nova. En aquesta modalitat es realitza just el contrari del que es fa en el control de prototipado ràpid, és a dir, se simula el convertidor, mentre que el controlador és real. D'aquesta forma s'executa en temps real el model fidel del sistema que es vol controlar en el simulador digital, i es controla mitjançant un controlador real. La simulació HIL en temps real és de gran utilitat en el procés de disseny dels convertidors, ja que permet analitzar el funcionament del controlador físic en condicions de funcionament normal i extrem del sistema sense posar en perill cap prototip car.
Com s'ha pogut comprovar en aquest article, la simulació és una excel·lent eina de treball per al disseny de sistemes de potència amb diferents possibilitats.
Bibliografia
Aquest treball s'ha realitzat amb el suport de la Universitat del País Basc/Euskal Herriko Unibertsitatea, el projecte S-PE09UN08 SAIOTEK del Govern Basc i les subvencions (IT394-10) per a impulsar les activitats dels grups de recerca del sistema universitari basc del Departament d'Educació, Universitats i Recerca del Govern Basc.
Zu idazle
Zientzia aldizkaria

