

La nueva era de los sistemas espaciales en la topografía y la geodesia
Kartografia eta Geodesia ingeniaria eta Topografia Ingeniaritza Teknikoko irakaslea
EHU

Para poder localizar y representar los elementos de la Tierra, la topografía debe conocer la forma y dimensiones de la Tierra, que es lo que ofrece la ciencia de la geodesia.
Cambios en las últimas décadas
Los primeros avances en topografía y geodesia tuvieron lugar tras la Segunda Guerra Mundial. Entonces desarrollaron gran cantidad de electrónica, mecánica, óptica, matemáticas, física... que revolucionaron las ciencias geomáticas, entre ellas la topografía y la geodesia, desarrollando nuevos métodos y herramientas. Estos métodos realizan la medida electrónica de la distancia y los ángulos a partir de ondas electromagnéticas. Posteriormente, el desarrollo de la informática permitió el desarrollo de software para la gestión de datos tanto matemáticos como geográficos, permitiendo la realización automática de complejos cálculos manuales.

La siguiente revolución ha llegado de la mano de los satélites. A partir de los años 70, el uso de satélites artificiales ha supuesto enormes beneficios en la topografía y, sobre todo, en la geodesia. De hecho, además de ubicar con precisión puntos muy alejados entre sí, la geodesia espacial ha abierto nuevas posibilidades para estudiar la forma de la Tierra, la geodinámica de la Tierra y la fuerza de gravedad. Sin duda, podemos afirmar que metodológicamente estamos ante una revolución: superados los clásicos de la geodesia y la topografía, los sistemas espaciales GNSS (Global Navigation Systems) han abierto nuevos caminos, tanto en trabajos topográficos convencionales como en trabajos e investigaciones de geodesia.
Localización
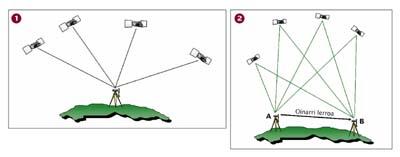
Comprender cómo se determina la ubicación del usuario mediante sistemas espaciales es relativamente sencillo. Las coordenadas de localización (X,Y y Z) se calculan por el método de la trilateración.
La trilateración es un método común en topografía. Con este método, midiendo la distancia entre un punto como el punto A y tres puntos fijos con coordenadas conocidas, se pueden obtener las coordenadas de posición del punto A (X, Y y Z).
En los sistemas espaciales, los puntos conocidos son los satélites, y la posición del receptor se conoce midiendo la distancia desde el lugar donde se encuentra el receptor hasta los satélites. Los satélites emiten continuamente señales de radio y, para calcular la distancia, se mide el tiempo transcurrido desde el satélite hasta el receptor y se multiplica por la velocidad de la luz. Se dice que se trata de un sistema pasivo, ya que los receptores sólo reciben señales. Mediante este sistema, millones de personas pueden conocer su ubicación simultáneamente.

Pseudodistancia y medidas por fase
Para medir la distancia desde el receptor a los satélites existen dos metodologías: la medida con código y la medición en fase.
En la medida con código, además de la señal, el satélite envía un código modulado a una determinada frecuencia de onda. Por correlación de este código se puede conocer el tiempo que tarda la señal en llegar al receptor, y multiplicando este dato por la velocidad de la luz se consigue conocer la distancia entre el satélite y el receptor. Esta medida de distancia se denomina pseudodistancia. Los receptores de navegación así lo indican, por ejemplo, los receptores utilizados tanto en vehículos como en montaña. Con este método se consigue una precisión en la ubicación de 15-30 metros.

Sin embargo, la precisión de 15-30 metros es claramente inaceptable para la geodesia y la topografía, en los que se requiere una precisión de unos milímetros y centímetros. Por ello, en estos casos, las distancias del satélite al receptor se miden mediante la fase de onda. Las medidas por fases se basan en la propia onda y no en los códigos modulados en la misma. Y como la longitud de onda de la onda es de unos pocos centímetros, la distancia se puede medir mucho más exactamente y se puede obtener una localización exacta. Sin embargo, la medición por fases presenta un obstáculo importante. Aunque en la señal que llega al receptor se puede conocer fácilmente el desfase de ondas, no es tan sencillo saber el número total de ciclos. Es el problema de la ambigüedad de ciclo. Para entenderlo hay un XIX. Un buen ejemplo del siglo XX.
XIX Estados Unidos. Los medidores de las Grandes Llanuras (Great Plain) del siglo XVIII medían los terrenos públicos que atravesaban los campos abiertos de la siguiente manera: en un carro repleto de piedras o estacas iban tres personas; una conducía el carro; la otra, con una brújula, mantenía el carro en la orientación a seguir; y la última, contaba el número de giros que había dado un trozo de tela unido a la rueda del carro. Cuando la tela daba tantas vueltas como una milla, ponían una piedra o una estaca y seguían adelante.
El sistema de posicionamiento por satélite es equivalente a la persona que mide el número de revoluciones de la rueda, con la diferencia de que cuando sube al carro se tumba detrás y se duerme. Cuando se despierta se preocupará y empieza a intentar averiguar la distancia; sabe que en ese momento la rueda está en medio de la gira, pero no sabe cuántas vueltas completas ha dado. Es el caso de la ambigüedad de ciclo: el receptor sabe el desfase, pero no el número de ciclos completos.
El número total de ciclos se calcula mediante software, mediante algoritmos, que en los últimos años han mejorado considerablemente: en poco tiempo (en pocos segundos o en pocos minutos) pueden conocer el número de ciclos. Para el cálculo del número total de ciclos, estos algoritmos deben contener al menos datos instantáneos de otro receptor. Por lo tanto, con un solo receptor no se puede conocer más que la pseudodistancia.
Localización diferencial por fases
La ubicación diferencial se basa en que las señales que llegan a ambos receptores sufren los mismos errores. Al estar los satélites a unos 20.000 kilómetros, las señales emitidas por ellos tienen que realizar un largo viaje atravesando la ionosfera y la troposfera para llegar al receptor, en el que sufren una serie de cambios o errores.
Se puede suponer que este viaje es el mismo para los dos receptores, por lo que la señal del satélite tendrá el mismo error en los dos receptores, lo que permite obtener el vector entre receptores con una precisión enorme (precisión en milímetros a diez kilómetros). A partir de ahí, y estando uno de los dos receptores colocado en un punto de coordenadas conocidas (fijado exactamente sobre un trípode, sobre el punto), se calcula la posición del segundo receptor: conociendo las coordenadas exactas del origen del vector, es posible conocer con precisión las coordenadas del segundo punto del vector.
Este método permite realizar el cálculo de la ubicación después de las observaciones, tanto en la oficina como en el momento. La localización actual se denomina RTK (Real Time Kinematic). En los trabajos realizados por RTK, el receptor situado en coordenadas conocidas (denominada base) envía en tiempo real los datos obtenidos del satélite al otro receptor (llamado móvil), normalmente mediante señales de radio. Como esta señal de radio tiene un alcance limitado, no se puede alejar demasiado el móvil de la base, hasta 30 kilómetros si no hay obstáculos entre ellos. Sin embargo, en los últimos años los datos recogidos en la base también se envían vía GPRS aprovechando las redes extendidas de teléfonos móviles.

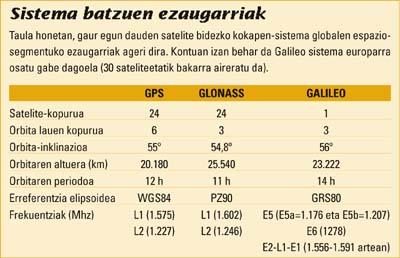
GPS, GLONASS y Galileo
Actualmente existen dos sistemas de posicionamiento por satélite disponibles: GPS y GLONASS. Un tercero, Galileo, empieza a construirse.
El primero fue el GPS, creado por el Departamento de Defensa de Estados Unidos con fines militares. La constelación NAVSTAR constituye el sistema GPS. El sistema GLONASS, por su parte, fue creado por el Servicio Soviético de Defensa y posteriormente cedido a la Agencia Espacial Rusa. Ellos, además de dar un uso militar, reforzaron el uso civil, pero muy tarde, por lo que hoy en día se utiliza menos que el GPS. Sin embargo, al depender de los servicios militares, ninguno de ellos asegura una señal permanente.
Galileo será el sistema europeo de navegación por satélite. Este sistema ofrecerá una gran precisión y, al depender del control civil, garantizará de forma permanente un servicio global de posicionamiento. Galileo es una iniciativa de la Unión Europea y de la Agencia Espacial Europea. Se trata de una constelación de 30 satélites: el primer satélite (y el único por el momento) fue lanzado el 28 de diciembre de 2005.
En la actualidad cada vez son más los receptores que pueden recibir la señal tanto del GPS como del sistema GLONASS. Algunos receptores utilizados en topografía y geodesia, por ejemplo, permiten utilizar ambos sistemas, aumentando el número de satélites y mejorando la precisión.

Ventajas y futuro de los sistemas espaciales
El sistema global de posicionamiento y navegación por satélite ofrece grandes ventajas en geodesia y topografía.
Los métodos clásicos utilizados hasta el momento han permitido conseguir la posición de un punto, por lo que es necesario garantizar la visibilidad entre un punto conocido y el que se quería ubicar. Por su parte, los sistemas de posicionamiento global por satélite permiten obtener una posición entre puntos no visibles, ya que se pueden conseguir líneas de base de decenas o centenares de kilómetros con precisión en centímetros. Además, a diferencia de lo que ocurre hasta ahora, los sistemas globales de posicionamiento por satélite permiten realizar mediciones en cualquier situación climática.
En el campo de la topografía, a la hora de realizar los levantamientos, la fertilidad ha aumentado considerablemente en los trabajos realizados mediante el sistema de satélite. En la topografía convencional se necesitan dos personas para realizar los trabajos, mientras que con los sistemas de posicionamiento por satélite sólo una persona puede trabajar y, además, ganar puntos por día.
También tienen limitaciones. Lo más importante es trabajar en lugares que dificultan la señal de los satélites: obstáculos superiores, edificios y árboles, como por ejemplo, destruyen la señal de los satélites y, en muchos casos, es imposible conseguir su localización. De cara al futuro, sin embargo, cuando el sistema Galileo esté disponible, el aumento de los satélites permitirá superar este límite en varios lugares.
Zu idazle
Zientzia aldizkaria

