

Moteurs électriques microscopiques
Nous savons tous environ combien petite est l'épaisseur d'une feuille de papier ou d'un poil, qui mesure un dixième ou deux du millimètre. Par conséquent, il ne faut pas croire qu'il existe un moteur électrique inférieur à l'épaisseur d'un cheveu. Les moteurs électriques que nous avons connus jusqu'ici sont de dimensions très différentes. Certaines sont impressionnantes (4.500 kW, par exemple, de la machine à train) et d'autres de quelques millimètres (par exemple, montres à quartz).
Tous ces moteurs électriques sont basés sur la force magnétique. En bref, ils sont basés sur la capacité d'un aimant (ou électroaimant) à attirer un morceau de fer. Pour augmenter cette force magnétique, les électroaimants disposent d'une bobine par laquelle le courant électrique est passé et un champ magnétique de haute intensité est créé. Dans la miniaturisation, cependant, les fils, les isolations et les enroulements présentent des obstacles insurmontables.
Les plus petits moteurs actuellement utilisés sur la base de la force magnétique sont ceux de montre à quartz. Ils fonctionnent en courant alternatif et même si le rotor mesure un ou deux millimètres, le stator surpasse généralement le centimètre avec sa bobine.
Mais malgré les obstacles, à l'Université de Californie (Berkeley), Roger Howe et Richard Muller fabriquent un moteur électrique aussi petit que l'épaisseur des cheveux. Le moteur n'a pas de bobinage et ne peut être vu avec le microscope. En outre, en principe, ce n'est pas un moteur électromécanique mais un moteur électrostatique, car il tire parti de la force électrostatique (et non électromagnétique).
La force électrostatique est un phénomène que nous pouvons voir tous les jours. Il suffit de voir comment la mousse de polystyrène expansé attire les plastiques ou comment le disque musical attire la poussière. La force d'attraction entre deux charges électriques de signe opposé en électrostatique est directement proportionnelle aux valeurs des charges et inversement proportionnelle au carré de la distance entre les deux. Par conséquent, si la distance entre les charges est la moitié, la force d'attraction sera quatre fois plus grande et si la distance est dix fois plus petite, la force cent fois plus grande, etc. Ainsi, même si les forces électrostatiques sont très petites en elles-mêmes, il faut noter que la distance entre charges est inférieure au millimètre. Dans les circuits intégrés, d'autre part, la distance entre les composants est d'un millième millier de millimètre, mesures dans lesquelles les forces électrostatiques peuvent être utilisées comme force motrice.
Dans ce nouveau moteur électrique microscopique, les petites pièces doivent donc être fabriquées avec une grande précision, tout comme les composants du circuit intégré. Depuis longtemps, des milliers de transistors sont introduits dans un carré de 5 mm de longueur de silicium.
Le processus d'élaboration de circuits intégrés est basé sur la photolithographie. Le circuit dessiné dans un gabarit est projeté comme diapositive au carré de silicium. Plutôt, ils projettent à l'envers de la diapositive, réduisant la taille et ne pas augmenter. En projetant l'image du modèle sur la couche de laques sensibles située sur la plaque de silicium, le traitement ultérieur permet seulement de maintenir dans la couche les zones éclairées (ou vice versa). Il existe d'autres procédures similaires pour la réalisation de circuits intégrés.
Au contraire, ces procédures, en plus des transistors, comprennent des détecteurs, des capteurs de pression, des accéléromètres, etc. ont commencé à être utilisés pour sa conception et les ingénieurs ont obtenu le moteur électrique. Le moteur est construit dans une couche de silicium polycristallin, qui est pris comme sandwich par les deux autres couches de silice.
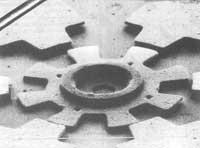
La forme extérieure du moteur est celle de ces couches. La silice est faite de moule ou de boîtier. Une fois la couche suffisante pour former les pièces mobiles déposée à l'intérieur, le moule extérieur se dissout en acide fluorhydrique, les pièces du moteur étant découvertes. Le rotor est similaire aux moteurs asynchrones. Il adopte la forme d'un engrenage de huit ou douze dents d'un diamètre de 6 ou 7 centièmes de millimètre, inférieure à l'épaisseur des cheveux. Le stator est sculpté directement sur le support en silicium. Il dispose d'un orifice circulaire d'entrée au rotor et d'encoches métallisées autour pour générer un champ électrique rotatif par courant alternatif. La distance entre le rotor et le stator (connu sous le nom d'entrefer dans les moteurs normaux, mais ici il faudrait l'appeler silicium) est de 0,5 millimètres.
Le moteur microscopique fonctionne comme le moteur asynchrone normal. Lorsque dans une certaine direction le courant est envoyé aux dénivelés du stator, son champ électrique extrême induit une électrification contraire dans les dents du rotor et, étant attirés par des charges de signe contraire, le rotor tourne en s'approchant des encoches.
Cependant, avant d'atteindre l'équilibre, la direction ou la distribution du courant de saignement change et les dents du rotor sont poussées avec force de répulsion. En contrôlant le courant du stator comme champ magnétique dans les moteurs asynchrones classiques, le rotor tourne continuellement. La puce est pour commander ce courant de stator. Le moteur microscopique se trouve à l'intérieur du microprocesseur.
D'autre part, ce modeste moteur générera des problèmes différents des précédents, car ils ne connaissent pas l'influence de la friction et de l'usure sur ces dimensions. Comment graisser les pièces par exemple ?
Cependant, il y a une autre question importante: Pourquoi ces moteurs seront-ils utilisés ? Et ce n'est pas si difficile de répondre. La puce sera le cerveau régissant et le muscle fonctionnant le moteur microscopique. Pour la microchirurgie, des ciseaux ou des scies circulaires seront construits, comme la rétine de l'œil ou la coupe de petites cellules dans un autre organe. Ou ils enlèveront la graisse des artères ou par des valves microscopiques expulseront des doses exactes de médicaments à un moment et à un endroit précis.
Bien sûr, aussi dans l'industrie. Dans l'alignement des diodes laser, fibre optique de télécommunications, etc. Ils sont également d'un grand intérêt pour les satellites et les sondes spatiales, car leur taille et leur poids sont d'une importance vitale dans ce domaine.
Zu idazle
Zientzia aldizkaria

