

Robot subterrani
Els carrers dels nostres pobles s'aixequen cada any amb sorollosos martells pneumàtics per a instal·lar canonades, millorar la xarxa de proveïment d'aigua o reparar cables de telefonia i electricitat. Per a això es realitzen rases en les quals els ajuntaments gasten molts diners. A més, les botigues contigües a la rasa són menys freqüentades, la gent no pot estar tranquil·la en la vorera i al final és molt costós tancar la rasa i posar el carrer en el seu estat anterior. També cal tenir en compte els accidents que es produeixen amb aquestes rases.
Aquesta situació és molt millorable amb robots subterranis. I és que aquestes màquines realitzen perfectament tots aquests treballs i reparacions sense obrir cap mena de rasa. Aquest tipus de robots s'utilitzen ja no sols al Japó, sinó sobretot a Gran Bretanya, Alemanya i Escandinàvia. A França s'ha començat a usar recentment en la zona de París. En realitat, mitjançant el sistema convencional, la durada d'una setmana d'obra es redueix a un dia utilitzant aquests robots tipus topo.
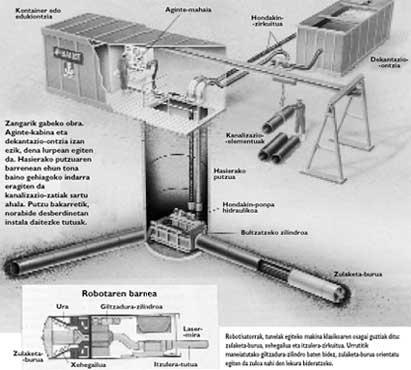
Aquests robots subterranis són una espècie de miniatura de màquines per a construir grans túnels. Porten radar i cambra o giróscopo perquè els guiïn des de dalt. Aquests robots requereixen bàsicament dos pous: un a l'inici de l'obra per a col·locar el robot i un altre al final per a sortir al final del treball.
La màquina entra en el pou inicial i s'orienta en la direcció de la línia. Després ho col·loquen en un suport i l'empenyen uns cilindres capaços de generar una força de fins a cent tones. El cap de perforació es tria en funció de les característiques del terreny i gira girant pel sòl obre el seu buit com si fos un talp. Al seu torn, entre el pou inicial i el capçal de tall es fa passar aigua a alta pressió. L'aigua, en el circuit de retorn, arrossega els fragments aixecats fins al recipient de decantació situat en la part superior.

A vegades, sobretot quan hi ha sòl tou, el sistema projecta l'argila líquida a pressió per a evitar la caiguda del sòl en passar el cap de perforació. Els cilindres que impulsen el cap cap endavant solen tenir un recorregut de dos metres. Quan avancen aquesta distància es recullen cap endarrere i en el suport es col·loca una peça de dos metres de longitud. A continuació, el cap de perforació torna a girar i els cilindres comencen a empènyer.
Per a fixar l'eix del túnel que es pretén realitzar, en el pou inicial, un raig làser colpeja la mira situada en la part posterior de la màquina. Tota la informació és enviada directament al lloc des de l'exterior del pilot perquè el conductor, si fos necessari, canviï l'adreça de perforació. Per a això haurà de manejar des del seu lloc els cilindres situats en l'articulació del cap de perforació.
El robot és capaç d'obrir el forat correctament, però quan realitzarà un recorregut corb té més obstacles i no és tan precís en línies corbes llargues de telegetación làser. Per a superar aquesta dificultat, l'empresa japonesa NTT utilitza en el seu centre pilot de Tsukuba un giróscopo de fibra òptica per a guiar aquests robots o topalls automàtics. Porta muntat en la trepo i en qualsevol corba pot haver-hi un error màxim de seixanta o un segon de grau, és a dir, un error de 4 centímetres en un camí de cent metres.
No obstant això, aquest tipus de robots, a més d'instal·lar nous orificis i canonades, haurà de prolongar les línies i canalitzacions subterrànies realitzades anteriorment o revisar les existents. En qualsevol ciutat, per exemple, hi ha quilòmetres de la xarxa de proveïment d'aigua per a estudiar i renovar, però treballar sense obrir rases no és tan fàcil. Mitjançant aquest sistema es pot reparar la canalització de 150 metres de fosa oxidada al principi i al final sense fer més que un forat. Per a això s'utilitzen dues màquines especials tirades amb un escut situat a dalt.
El primer té unes fulles d'acer flexible que grata l'interior del tub. Una vegada neta la superfície interna del tub, una altra màquina pneumàtica connectada a un mesclador de ciment projecta el ciment en tota la superfície del tub. Finalment, una peça cònica finor tota la superfície interior del tub després de la màquina pneumàtica.
Si la part oxidada és la part exterior del tub, el problema sol ser més greu, ja que és necessari substituir tot el tub. L'únic sistema per a substituir el tub sense obrir rases és dividir internament per un pistó tallant i comprimir els trossos en ell.
Al no tenir intel·ligència artificial, aquests robots/topo no saben evitar obstacles. En el cas que sigui necessària l'execució d'un tram de canalització o línia, podran existir altres instal·lacions o barreres preestablertes en el mateix emplaçament. Moltes d'aquestes instal·lacions o barreres poden estar en els plans dels serveis tècnics de l'Ajuntament, però també són moltes les imprevistes i qualsevol cosa pot aparèixer sota terra. A Gran Bretanya i el Japó utilitzen un radar de polsos sobre el carrer per a detectar l'enterrat.
El radar es fa passar lentament sobre la part que es desitja investigar i analitza els senyals reflectits en el sòl. Cada vegada que hi ha un canvi estructural en el subsòl, el perfil dels senyals reflectits indica que el tub es troba a certa profunditat. En el primer repàs es detecten entre el 60% i el 80% de les canalitzacions, però després es passa una vegada i una altra pel mateix camí detectant diferents profunditats. (Per a això cal canviar la freqüència de l'ona emesa durant el període). Això permet conèixer el 95% o més dels objectes subterranis.
La detecció de canonades i cables és una cosa, però la pròpia estructura del terreny també pot sofrir modificacions. Si el capçal de perforació en el subsòl format per sorres trobés calcària, les dents s'espatllarien. Per això, per a estudiar l'estructura subterrània s'utilitzen raigs gamma i amb l'ajuda d'unes sondes es coneix la densitat electrònica dels materials. La irradiació de neutrons també s'utilitza per a mesurar la quantitat d'aigua subterrània. A més, la sonda de neutrons sembla servir per a detectar fugides en les conduccions d'aigua i aprofitar el desaprofitament d'aigua a les ciutats per avaries.
No obstant això, és clar que en el futur als carrers es reduiran considerablement els martells pneumàtics i les rases que ara ens molesta.
Zu idazle
Zientzia aldizkaria

