

Robic III : robot grimpeur pour environnements dangereux
La deuxième semaine de novembre a eu lieu le séminaire de Robotique appliquée à l'industrie électrique au siège du centre technologique CEIT de Donostia. Il a présenté le robot mobile créé par le centre technologique CEIT dans le projet SRT, parrainé par les entreprises Robic III, Iberdrola et Endesa. Ce robot est capable de monter sur des surfaces verticales grâce à un système de ventouses et est doté de capteurs et de caméras pour trouver des fissures. Son premier rôle sera d'inspecter les tuyaux et les dépôts de déchets des centrales nucléaires à la recherche de fissures. Ce projet est né pour éviter le risque de rayonnement des travailleurs qui effectuent ce type de travail dans les centrales nucléaires.
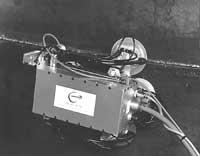
Le robot, créé par les membres chiliens du CEIT Leoncio Briones et Paul Bustamante, vise principalement l'inspection, l'exploitation et la maintenance des centrales nucléaires. La conception a également cherché à minimiser la taille, le poids et le coût de fonctionnement du robot. En conséquence, le robot grimpant Robic III est rapide, compact, bon marché et robuste, et peut être construit avec des éléments facilement localisables sur le marché. Avec un système mécanique relativement simple, un matériel et un logiciel de contrôle plus sophistiqués sont nécessaires, y compris les caméscopes, les capteurs de vide, les électrovannes et les composants électroniques. La figure 1 montre la carrosserie de Robic III. Dans cette carrosserie se trouve le système locomoteur d'un côté et le capteur à ultrasons et caméras vidéo de l'autre.
Mécanisme de locomotion
Dans l'unité centrale du robot il y a deux cylindres sans tiges de 100 mm de longueur et 10 mm de diamètre. Les conducteurs transversaux qui glissent sur ces cylindres portent deux verres d'absorption de chaque côté du robot. Les deux autres coupes d'absorption sont fixes et se trouvent à l'avant et à l'arrière du robot.
Le robot fonctionne grâce aux coupes d'absorption mobiles et fixes, décrites ci-dessous:
- On agit sur les coupes fixes d'absorption avant et arrière du robot pour qu'il soit collé au mur.
- Les coupes d'absorption mobiles sont portés devant.
- Les verres d'absorption mobiles sont affectés et les verres d'absorption fixes sont arrêtés.
- Les coupes d'absorption mobiles sont retardées jusqu'au bout du cylindre, générant le mouvement d'avancement du robot.
Les coupes d'absorption mobiles ont un mouvement de rotation par rapport aux rails transversaux. Cela peut impliquer un mouvement rotatif et transversal du robot.
Système de vide
Dans les prototypes précédant les robots grimpants, le plus gros problème était le poids élevé des générateurs de vide et des vérins pneumatiques conventionnels. Robic III a donc décidé de créer un système de génération de vide plus compact et un nouveau sous-système de positionnement pour réduire le poids et le volume. On peut observer que le générateur de vide a un axe de rotation qui permet le mouvement du robot sur des surfaces cylindriques et sphériques.
Système de contrôle

Le système de commande est constitué d'un tableau de commande basé sur le processeur Intel 89535. Bien que toutes les électrovannes soient de type on-off, chaque cylindre possède un capteur de position pour contrôler précisément le mouvement du robot. Chaque capsule d'absorption a un capteur de vide dont les mesures sont utilisées pour déterminer si chaque étape de l'algorithme de contrôle a bien ou pas. Si une étape n'a pas tout à fait bien, une série de coups courts est répétée jusqu'à ce que la défaillance appropriée. Cela garantit le bon fonctionnement du robot pendant les soudures et les irrégularités. Le robot est téléopéré par un ordinateur personnel avec différentes caméras et capteurs.
Le premier rôle du robot grimpeur Robic III sera d'inspecter sous rayonnement de 1.2 Gy/h un réservoir contenant le résidu radioactif de la centrale nucléaire de Santa María de Garoña. De cette façon, les environnements dans lesquels le personnel ne peut pas atteindre peuvent être inspectés, à la fois par des capteurs et des caméras.
Le projet SRT a été promu par ENDESA et IBERDROLA en 1994 dans le but de créer des systèmes robotiques d'inspection et d'exploitation dans les centrales nucléaires de l'État espagnol.
Zu idazle
Zientzia aldizkaria

