

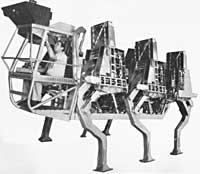
El robot a peu es prepara per a un dur passeig
En la Conferència Internacional d'Avanços en Robòtica celebrada l'any passat a Tòquio, la peça de maquinari més sorprenent va ser el robot a peu.
El robot haul es coneix com a vehicle de suspensió adaptat (ASV, adaptive suspension vehicle) i va ser construït amb l'ajuda de 5 milions de dòlars oferta per l'Agència per a la Defensa dels Projectes de Recerca Avançats als EUA.
ASV sembla una mescla entre el camell de tres còncaus i la mantilla de monges. Però Kenneth Waldron, cap del grup que va construir els robots de la Universitat Ohio State, assegura que és l'assaig més sofisticat mai realitzat entre els vehicles a peu".
Aquest vehicle està dissenyat per a circular per terrenys llaurats. L'avantatge d'aquesta eina amb vehicles de rodes és la facilitat de passar per sobre d'un obstacle important.
Es considera que l'ASV és capaç de passar sense evitar séquies de tres metres d'amplària i obstacles de dos metres d'altura.
A més del cos, és important tenir sensors de dispositiu. "Tenir un sensor òptic no et resultarà massa profitós si no coneixes la direcció que s'està assenyalant", afirma Waldon.
ASV té una longitud de 5 metres, pes 2,72 tones i és capaç de transportar 90 quilos.
Funciona amb un motor adaptat de ciclomotors de 50 quilowatts i pot aconseguir una velocitat de 3 quilòmetres per hora.
Un radar òptic situat en la part superior de la cabina d'aquest vehicle indica al conductor el sentit de la seva marxa.
Un làser d'arsenuro de gal·li produeix un raig infraroig que es reflecteix en un sistema de miralls mecànics i analitza la part davantera del vehicle. Aquests raigs infrarojos reflectits són analitzats mitjançant cinc computadors d'una sola funció. Altres 10 computadors d'una sola funció coordinen el moviment de les cames, llegint ordres procedents del comandament guia i enviant informació a les pantalles de la cabina.
En la part superior de la cabina hi ha dues pantalles. La de l'esquerra indica les potes que hi ha en el sòl en tot moment. El de la dreta és l'estat exacte de totes les cames.
Per a culminar i posar en marxa la construcció d'ASV, Waldron i el seu equip van haver de resoldre una sèrie de problemes tècnics. Un dels majors problemes va ser el subministrament d'una gran quantitat de peces que es desplacen de manera independent, amb una gran eficàcia i un bon control.
"Has d'aconseguir una gran eficiència, has de dotar-te de capacitats", diu Waldron.
Enguany, quan tots els mòduls de programari estiguin llestos, ASV disposarà de sis tipus d'operacions per a complir els seus objectius en diferents àrees. Per a això és necessari que el pas concret quan l'operador té cada cama sota control, un mecanisme de circuit tancat en el qual el computador de l'útil canalitza cada cama; un mecanisme totalment automatitzat, en el qual la successió de les cames no està predefinida, ja que depèn de la terra; un mecanisme creuat pensat per a circular més ràpid per terrenys aspres, i un mecanisme d'embranzida, que íntegrament és similar al mecanisme creuat, però eliminant amb major velocitat una part de la informació dels sensors.
La construcció d'ASV es va realitzar al maig. La setmana anterior a la realització es van moure les seves cames individuals per primera vegada. Inicialment les proves es van realitzar mitjançant un sistema de sobretaula. No obstant això, enguany serà totalment automatitzat.
Zu idazle
Zientzia aldizkaria

