

Motor, hélice y lema, a punto de superarse
La energía electromagnética del agua del mar ya no es ficción que los buceadores muy silenciosos y ambiciosos se realicen sin motores ni piezas móviles. Todavía no lo está, pero estudios muy avanzados y en muchos países. Al cabo de unos años, los descubrimientos sobre el impulso magneto-hidro-dinámico (MHD) han cobrado gran relevancia. El principio físico en sí mismo es muy sencillo y ya lleva siglo y medio explicándolo en las Enseñanzas Medias.
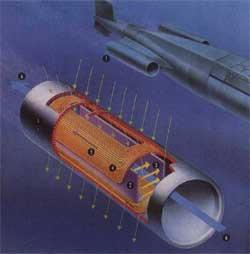
silencio, la rapidez y la ligereza de uso son las ventajas de un buceo de impulso magneto-hidro-dinámico. Dentro de cada impulsor tubular (1) dos electrodos (2 y 3) desde el contacto, crean un campo eléctrico transversal (flechas amarillas), por lo que también la corriente, y en el agua salada del mar dentro del tubo. La bobina superconductor (4), mientras está alimentada por una corriente (5), forma un campo magnético vertical en el agua (flechas verdes), perpendicular al campo eléctrico. La interacción de estos dos campos, aunque débilmente conductor en aguas marinas, genera la fuerza de Laplace/Lorenz (6) (asociación simultánea del campo eléctrico y magnético con respecto a) y esta fuerza electromagnética es la que impulsa el agua hacia atrás. Por reacción, el buceo se impulsa hacia delante. Este impulso tipo MHD funciona con "conductividad y circulación interna". Conductividad, ya que gracias a los electrodos genera corriente eléctrica en el agua del mar, y por tráfico interno, estos campos eléctricos y magnéticos se accionan internamente en las aguas marinas.
Si se coge un conductor eléctrico como el hilo de cobre y se le aplica un campo eléctrico, el hilo lo atraviesa una corriente eléctrica. Ahora, vamos a murgar en un campo magnético creado por un imán y asociado al campo eléctrico: la influencia de estos dos campos entre sí hace que el conductor, de acuerdo con la ley de Laplace/Lorenz, genere fuerza electromagnética, donde la dirección de la fuerza es, además, asociada al campo electromagnético y al campo eléctrico. Si el hilo de cobre es libre, esta fuerza puede provocar un desplazamiento.
El valor de este efecto también es aplicable a conductores líquidos o gaseosos, y especialmente al agua de mar. De hecho, al ser agua salada, es conductor de la electricidad a diferencia del agua dulce. En consecuencia, si un barco tiene equipo con dispositivo de aplicación simultánea de campo magnético y campo eléctrico en aguas marinas, el agua sufrirá la fuerza de Laplace/Lorenz y el barco se desplazará, es decir, ¡será capaz de moverse hacia delante! El sistema de impulso denominado MHD es por tanto un sistema de impulso reactivo. La fuerza ejercida en el agua actúa de reacción en el barco.
Así que también piensas: Si es algo tan simple, ¿por qué no se ha pensado y puesto en marcha antes? Sí. Se ha pensado, pero el propio estudio lo mencionaba en su publicación hacia 1960. De hecho, sus resultados fueron capaces de desesperar a cualquier persona en aquellos tiempos. El primer trabajo de estudio sobre el impulso magneto-hidro-dinámico para los barcos fue escrito en 1962 por un americano llamado Phillips, y entre otros, expresó:
- Con los actuales medios de inducción magnética, el sistema más adecuado impulsaría el buceo de 600 pies a una velocidad de 10 nudos con un rendimiento eléctrico del 8%. Para conseguir mayores rendimientos y velocidades se necesitan zonas mucho mayores.
- Este pobre resultado se debe a la baja conductividad del agua del mar.
- El mal rendimiento y los impulsos débiles de este sistema hacen incapaz de utilizarlo como sistema de impulso.
El agua del mar es en realidad un mal conductor de la electricidad. Su conductividad es diez millones de veces menor que la del cobre y, como ha destacado Phillips, para compensar este inconveniente, se necesitan zonas de gran fuerza, pero los medios de aquella época no los ofrecían. Debido a estas carencias técnicas y a su carácter conservero, las investigaciones se prolongaron hasta 1967.
Pasados unos años, se retomó el tema y continuó estudiando, la superconductividad ha dado un gran avance. Por cierto, los superconductores son materiales que apenas contraponen resistencia a la circulación eléctrica y que admiten densidades de corriente miles de veces superiores a las aceptadas por el propio cobre. El núcleo de la clave era, por tanto, material.
En este sentido, una bobina superrconductora es capaz de generar un campo magnético cien por cien más grande que el electroimán normal, y además sin grandes gastos de calefacción y electricidad por efecto Joule. Este gran campo magnético ha provocado la revisión del sistema de impulso tipo MHD.

unos minutos la presión baja y el agua se evapora por debajo de los 100º. A baja presión, la evaporación también se produce a bajas temperaturas. Es lo que una hélice influye sobre su superficie al girar a alta velocidad en el agua. La presión disminuye lo suficiente como para que las burbujas de vapor se formen en frío. Es lo que se conoce como vacío o cavitación. Estas burbujas incrementan el sonido natural de la hélice y generan un ruido especial. El silencio imprescindible del submarinismo se ve afectado.
Los americanos fueron los primeros en iniciar a principios de los años 80 los trabajos teóricos sobre este tipo de impulso. Sus investigaciones, entre las que destacan las del laboratorio Argonpe de Illinois, son costeadas por el Departamento de Defensa y quieren ser utilizadas en el submarinismo. Los buceadores militares, por ejemplo, se enfrentan en estos momentos a un problema decisivo: el silencio.
Sus piezas mecánicas giratorias (motores, hélices, ejes motrices, etc.) producen ruidos que los sistemas de detección pueden identificar. Por ejemplo, el giro de la hélice produce una reducción de presión en una zona cercana y el agua se evapora. Este fenómeno de vacío produce un ruido especial, importante e identificable, que se ve obstaculizado con el sistema de impulsión tipo MHD; el interés de un submarinismo, por supuesto, es un funcionamiento totalmente silencioso, sin hélices ni piezas móviles.
El silencio no es la única cualidad del sistema de impulso tipo MHD. Este modo de impulso permite, teóricamente, circular a velocidades muy altas y obtener rendimientos energéticos muy altos. Ofrece la posibilidad teórica de eliminar cualquier pieza mecánica móvil, incluyendo el lema, así como mejorar los rendimientos hidrodinámicos de los buques.
El sistema de impulso tipo MHD no debería limitarse a actividades militares. En este ámbito es muy importante la iniciativa japonesa. Y es que en los últimos tiempos, financiados por grandes sociedades privadas, se han metido muy intensamente en un programa experimental civil. La Universidad de Kobe cuenta con una maqueta de un nuevo equipo de impulsores de este tipo.
Los antiguos soviéticos, por su parte, han trabajado durante mucho tiempo en el Riga (Letonia) en un centro de investigación muy importante dedicado al área de impulso de líquidos MHD. Ahora todo esto, con la independencia de Letonia y la profunda crisis económica de las repúblicas soviéticas, se sabe, pero al menos lo aprendido.
Francia tampoco anda detrás. Un pequeño grupo lleva más de dos años trabajando en el Instituto de Mecánica de Grenoble y, entre otros, en el campo de las necesidades espaciales (avión espacial Hermes), la industria nuclear, Madylam, fusión termonuclear, aplicaciones metalúrgicas (plasma), superconductores, electroquímica, etc. Para ello cuentan con el apoyo del gran industrial Jeumont-Schneider, del norte de Francia. Inicialmente, este equipo de Grenoble estaba realizando trabajos de síntesis teórica, que consistía en un análisis exhaustivo de los diferentes tipos de impulsos para MHD.
Pero volviendo al tema, el llamado impulso conductual, en función del origen descrito al principio del artículo –combinación del campo eléctrico más el campo magnético, igual que la creación de la fuerza asociada a Laplace/Lorenz–, no es la única posibilidad y existe una segunda vía, el impulso inductivo.

En Japón ya cuentan con el proyecto de allanador de impulso tipo MHD. La corteza o casco del conejo es de medio cilindro con tres o cuatro bobinas superrconductoras (1) separadas por ángulos de 30°. Cada bobina está montada con un par de electrodos con un ánodo (2) y un cátodo (3). Según la actitud de las bobinas y la sucesión de los cátodos de ánodos, se les alimenta la corriente y los electrodos crean campos eléctricos tangentes al casco (flecha amarilla). Al mismo tiempo, los campos magnéticos creados en el agua por bobinas superrconductoras (flecha verde) se conocen por rayos en el casco, siempre unidos a campos eléctricos. En consecuencia, dan fuerza a La place/Lorenz (4) y éstas ejercen una fuerza colateral y direccional sobre el eje del buque, empujando el buque hacia delante. A diferencia del submarinismo, este caso es de impulso en MHD de tráfico externo. Este tipo de buceo también está en proyecto en Japón.
Como es sabido, la inducción eléctrica fue descubierta por Faraday hacia 1830. El campo magnético que se desplaza y/o cambia de valor crea en un cuerpo conductor la llamada corriente inducida. Por lo tanto, el sistema de impulso por inducción es de aplicación exclusiva de esta ley. En el agua de mar se produce un campo magnético deslizante a través de una bobina de forma adecuada para pasar una corriente alterna.
Este campo magnético ondula el bobinado longitudinalmente. Al ser variable, genera corrientes inducidas en el agua y la interacción entre el par magnético/corriente inducida se transforma en fuerza ejercida en el agua, llegando a ser lo suficiente para avanzar hacia el buque.
En resumen, la diferencia entre los dos tipos de impulsos es que los impulsos por conducción utilizan dos zonas separadas –el campo eléctrico generado por los electrodos y el campo magnético generado por una bobina–, mientras que los impulsos por inducción, el campo eléctrico es inducido por un campo magnético deslizante y la ausencia de electrodos (solución que investigó Phillips y comentó al principio).
Otro cuestionario de esta pareja alternativa de conducción/inducción se centra en los siguientes conceptos: si se puede hacer un barco o buceo para funcionar con impulsión en MHD; si el campo magnético y eléctrico se puede crear en el exterior del casco y si la fuerza de impulso lo rebota alrededor del barco; o si se puede conseguir que el agua circule por los canales que circulan a lo largo del barco en ese canal.
Por ambas vías, los impulsores pueden ser de cuatro tipos: conducción por tráfico exterior, conducción por tráfico interior o por canal, inducción por circulación exterior e inducción por circulación interior o por canal. Vamos a comparar las características y conclusiones de estas cuatro formas y en función de los resultados obtenidos y sobre todo de las necesidades, se podrá realizar la selección.
¿Qué elegir, de conducción o de inducción?
Cada opción tiene sus ventajas e inconvenientes y todo depende de peticiones concretas. Por ejemplo, el de inducción tiene la ventaja de no tener electrodos, evitando problemas de corrosión, electrólisis y ruido de este tipo (muy interesante para el submarinismo, por ejemplo). Por el contrario, las de inducción, son muy difíciles de maniobrar y cada vez que hay que cambiar de velocidad, es necesario regular la sincronización del campo magnético cambiando su frecuencia, lo que puede reducir el rendimiento. La retranquilla también es muy difícil de inducir. En general, la última es más flexible, pero también tiene problemas. Por lo tanto, hay que buscar la solución correspondiente.
¿Tráfico interno o externo?
Comparativamente en la actualidad, una ventaja visual es que el rendimiento eléctrico podría alcanzar un nivel entre el 65% y el 85% del resto de áreas diseminadas dentro del canal o canal. Este rendimiento, sin embargo, es mucho más débil cuando se realiza en zonas exteriores del conejo. Porque la energía se dispersa sobre todo hacia el infinito, "calentando el mar"... Por otra parte, al alejarse un poco del casco, el campo eléctrico y el magnético no se mantienen unidos entre sí.

Esta lancha japonesa deberá dar comienzo a la respuesta. Con 22 m de largo, 10 m de ancho y 150 t de peso, está equipado con las técnicas tractoras de buceo de impulso MHD "con conducción de circulación interna". 6 canales de 0,25 cm de diámetro con un par de electrodos de 2,5 m de longitud cada uno. La fuerza de impulso anunciada es de 8.000 N y tiene una velocidad de 10 nudos (18 km/h) con capacidad para 10 pasajeros. Estos resultados todavía son peores para los conejos comerciales, pero el sistema puede mejorar… y seguramente lo tendrá.
Otra ventaja de la circulación de canales o tubos es la del silencio, muy apreciada al menos en el ámbito militar. Los campos electromagnéticos enviados al exterior del conejo emiten una señal demasiado fácil de reconocer. Pero el tráfico interior también tiene inconvenientes. De hecho, el agua que impulsa el conejo al circular por el canal o conducto sufre una fricción o rozamiento adicional en las superficies más importantes mojadas y el rendimiento hidrodinámico tampoco es tan bueno en este sistema.
Parece que, por consideraciones de rendimiento, simplicidad de uso, etc., el sistema de impulso por conducción de canal se ha promovido para la acción civil (en la barca rápida de los japoneses mencionados) y por el contrario, el de circulación exterior en las pruebas de buceo militar americano y en el proyecto del valiente de hielo en la Universidad de Kobe en Japón, sin que ello signifique que la inducción haya sido definitivamente descartada.
En la actualidad, los japoneses de la Universidad de Kobe han expuesto la segunda maqueta de su nuevo modelo de barca (figura 4) equipada con un sistema de impulsión tipo MHD de 6 sectores cada uno, con una longitud de 2,5 m y un diámetro de 25 cm formando canales o tubos cilíndricos. Tiene dos electrodos lisos paralelos y tiene el campo eléctrico asociado al magnético, circulando las aguas a los muros del conejo. La elección de diferentes sectores permite obtener la mejor eficacia del campo magnético, reduciendo las pérdidas de campo magnético en las ubicaciones en anillo (4 teslas en el centro de los canales).
Por el contrario, este avance de la energía electromagnética se realiza a costa del rendimiento hidrodinámico. De hecho, 6 canales multiplican por igual el rozamiento con sus paredes interiores. Este conejo, construido para demostrar la efectividad del impulso tipo MHD en conejos flotantes, deberá conseguir mejores resultados para alcanzar rendimientos económicamente interesantes.
Los americanos todavía no han sido capaces de pasar por la maqueta de su buceo. A lo largo de varios años se han realizado estudios técnicos sobre el impulso a la conducción con circulación interna por canales, pero con diversas figuras geométricas. Los electrodos, zonas y circulaciones presentan representaciones muy complejas.
Los rendimientos y resultados para cada tipo ya están calculados. El impulsor para conejos grandes está experimentando en túnel. Con una longitud de 15 m, están preparadas para recrear las características de un verdadero buceo, pero al ser el impulsor un inmueble, el agua es la que circula. Parece ser que a gran escala todavía no han podido ser en Errenteria. Por ejemplo, un buceo de 200 m de longitud y unos 15 m de diámetro requeriría de varias decenas de megavatios de potencia para moverse a 20 nudos, lo que es imposible. Por lo tanto, ¡todavía tiene mucho que mejorar!
Los descubrimientos en torno a 1986 y los nuevos superrconductores pueden contribuir potencialmente a mejorar los resultados del sistema de impulso en MHD. Estos nuevos materiales (cerámicas, óxido de cobre, etc.) no necesitan temperaturas tan bajas como las aleaciones empleadas hasta el momento (-269°C) para mantener la superconductividad y su contenido en nitrógeno líquido (-196°C) es suficiente, por su baja facilidad de uso y coste.
Esto explica el prestigio de los nuevos "super" creados en 1986. En la actualidad parece que se puede utilizar de cualquier manera estos materiales. Sin embargo, los científicos prefieren esperar. Y es que llegarán antes o después lo que necesitan. Por lo tanto, el desarrollo de todo ello depende en gran medida de los superrconductores.
Mientras tanto, a partir de hoy, gracias al submarinismo en MHD y a las barcas rápidas, los mismos equipos que los superrconductores clásicos refrigerados por helio pasan a ser capaces de competir con otros superrconductores y métodos de refrigeración, con embarcaciones a motor.
La teoría del sistema de impulso MHD está bien entendida y los cálculos ya son suficientemente fiables. Para calcular su rendimiento en función de todos sus parámetros, se incluyen todas las ecuaciones de electromagnetismo, mecánica de fluidos y dinámica. A mayor profundidad, sin embargo, el problema puede resolverse, al menos a medias, con algunas simplificaciones. El campo magnético, por ejemplo, no tiene nada que ver con la velocidad del conejo, aunque esta zona no es constante en la formación del espacio. El rendimiento total, es decir, entre la fuerza impulsora del conejo y el impulso electromagnético que lo produce, se divide en tres rendimientos parciales:
Por ejemplo, para mejorar el rendimiento de impulso es necesario mejorar la geometría de canal o tubo, pero no afecta a otras partes. El rendimiento de impulso también depende de la velocidad del conejo. Dado que no es posible modificar las formas de tubo, etc., en definitiva el rendimiento debe depender de los resultados de las características técnicas requeridas. |
Zu idazle
Zientzia aldizkaria

